
Pavement Roughness Modeling Using Regression And Ann Methods For Ltpp Western Region

Abstract
This study aims to develop pavement roughness models using multiple linear regression equation and artificial neural network (ANN) modeling approaches. The model database uses International Roughness Index (IRI) data included in a national database for the Western region. Datasets for asphalt pavement with bound base at 32 different locations are considered in the analysis. The variables included are IRI, pavement age, design structural number, equivalent single axle load (ESAL), and also a dummy variable for construction number. The LTPP data was used to compare predicted IRI values using the improved linear regression equation with R of 0.573, with different types of ANN models. The ANN models considered are static ANN, feedback ANN, and dynamic ANN. The verifications of the improved dummy regression equation predictions for 39 data points showed only -2.9% difference compared to the mean IRI. Comparisons between the mean predicted IRI values showed that the enhanced dummy regression equation gave a better prediction compared to the ANN model with a minimum error of 37.9%. Out of three ANN models, the feedback ANN provided a better prediction compared to the static and dynamic ANNs. Further analysis showed that the predictions using training all data sets are more accurate with R ranged from 0.740 to 0.827. It is important to consider ESAL and construction number for an accurate and reliable future IRI prediction.
Keywords: LTTP, IRI roughness, asphalt, ANN, modeling, pavement performance
Introduction
One of the goals of the pavement design and asset management is to increase pavement life considering the effects of pavement material and environment on asphalt pavement performance. One of the primary component of serviceability-performance concept is pavement longitudinal roughness, implemented in the improvement of American Association of State Highway and Transportation (AASHTO) pavement design procedures from 1960 to 1993 (AASHTO, 1993). Post-2000 pavement design guide that considers stresses, strains, and deflections within a pavement structure, described asphalt surface roughness as smoothness and measured as part of highway pavement asset management system (Uddin, Hudson, & Haas, 2013; Mohamed Jaafar, Ahlan, & Uddin, 2015). In life cycle assessment of pavement design alternatives toward sustainable road infrastructure development, the future IRI prediction is an important factor for a long-term asphalt pavement maintenance cost-benefit ratio projection.
Review of relevant literature
Road roughness in particular indicates ride quality of any road users (AASHO, 1962). The IRI was the current standard roughness indicator being used worldwide. Meegoda and Gao (2014) studied the time-sequence surface roughness data of the General Pavement Study (GPS) test sections and developed a model to predict surface roughness progression as the pavement age increases. The final model is shown in Equation 1.
Eq. 1
The alpha (α) describes the deterioration rate of the pavement as a function of cumulative traffic loads (KESALs/year), structural number (SN), freezing index (FI), and annual precipitation (AP). The General Pavement Study (GPS) 1 data sets from 13 states were used to validate the model. The reliability of the roughness progression of the asphalt pavements was modelled using the Weibull distribution. The results showed that the difference in the median roughness value between the measured and predicted values was not significant. There is no correlation coefficient, R value of the measured vs. estimated IRI plot was reported; however, the plot indicated that the data points fit closely to the equality line, which suggests a reliable model.
Madanat, Nakat, Farshidi, Sathaye, and Harvey (2005) developed a mathematical model to predict the progression of the asphalt pavement roughness. In this study, the linear regression equations were developed to predict increment of roughness progression (∆IRI) using Washington State’s Pavement Management System (PMS) database. Eight independent variables were used which include the IRI in previous year, ESAL changes in the year of observation, cumulative ESAL, base thickness, total asphalt layer thickness, time since last asphalt overlay or bituminous surface treatment (BST) overlay, minimum air temperature, and yearly precipitation. In addition, three dichotomous variables for asphalt overlay, BST overlay, and maintenance application were also considered. The linear regression’s R of 0.725 was observed; however, no R value of the measured vs. predicted IRI was reported.
Attoh-Okine (1994) applied the (Artificial Neural Network) ANN’s back-propagation method to evaluate the capabilities of the ANN to predict roughness progression in the flexible pavement. An extensive research investigated structural deformation as the factors of modified SN, increment of traffic loads, severity of cracking and thickness of cracked layer, and incremental variation of rut depth. Kargah-Ostadi, Stoffels, and Tabatabaee, (2010) developed the changes in IRI over time roughness prediction model for rehabilitation recommendation using the ANN. The statistical analysis on 20 variables was conducted to determine any significant correlation with IRI. Only eight variables were included in the final model. The R of 0.979 was observed which shows that it is feasible to use IRI as the prediction criteria.
Comparison of the Southern region enhanced regression equation with the AASHTO MEPDG equation
Mohamed Jaafar et al. (2015) developed the enhanced linear regression that incorporates dichotomous (dummy) variable for construction number, namely CND for the LTPP southern region test sections. Figure 1 illustrates the IRI values (both measured and predicted) for data sets in Southern Region. The improved regression equation was included in the plot and high R value of 0.865 between the measured and predicted IRI values was observed. The comparisons using the enhanced regression equation and the MEPDG model were conducted based on 10 independent data sets from 1990 to 1995 (FHWA 2009; MDOT, 2013).
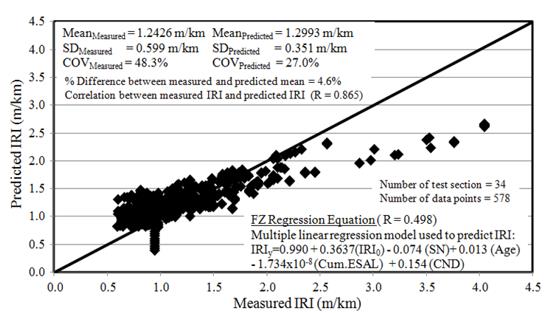
The overall results showed that the MEPDG forecasts are deprived for most of the data sets. The enhanced regression equation showed a better R of 0.874 compared to the predictions by the MEPDG regression equation (R is 0.819). In addition, the mean IRI values predicted by the MEPDG equation is about 23% higher than the measured IRI (mean value). The difference is greater compared to the enhanced equation’s prediction with only 5.5% more than the mean measured IRI value (Mohamed Jaafar et al., 2015). A similar approach was used to develop the enhanced dummy regression equation to assess the reliability of the equation to predict future IRI value in the Western region. However, no comparison with the MEPDG equation will be conducted since the rut depth data sets for GPS 2 in the Western region are missing completely, either from online LTPP database or LTPP standard data release 26.0 CDs.
Problem Statement
Existing road fatalities statistics indicate that there is a need to maintain acceptable road condition over time. This goal is possible if the enhanced predictions models are used in the pavement structural design. The literature review to date indicates that the lifetime maintenance and rehabilitation (M&R) history is not considered in asphalt pavement condition deterioration progression modeling, including the mechanistic-empirical pavement design equations. In the historical asphalt pavement database records of the LTPP research program of the National Academy of Sciences, the M&R sequence is denoted by the construction number (CN). Therefore, there is a need to consider the CN in the pavement condition deterioration modeling.
Research Questions
Evaluation and enhancement of condition deterioration progression models are conducted using both multiple linear regressions and ANN modeling methods. Asphalt pavement surface roughness explained by the International Roughness Index (IRI) is the focus of this research. The IRI roughness condition deterioration progression modeling is conducted to evaluate the following research questions:
- Is the use of the CN as a dummy variable in the enhanced condition deterioration predictive model equation will improve the reliability of the equation with lesser error?
- Is the use of ANN modelling method will improve the prediction of IRI value as compared to the multiple linear equation approach?
- Between ANN’s statistic, feedback, and dynamic approaches, which method will give the best prediction for future IRI roughness values.
Purpose of the Study
The study aims to develop an enhanced asphalt pavement roughness condition deterioration model that considers the following independent variable: i) initial IRI (IRI0), ii) cumulative ESAL, iii) pavement age, iv) structural number, and v) construction number as a dummy variable (CND). The roughness deterioration prediction models were developed using the multiple linear regression equation and the ANN approaches. Only test sections with asphalt layer compacted over bound base (GPS 2) in the Western climatic region of the LTPP are selected for further study.
Research Methods
The IRI data are compiled for all 32 test sections in the LTPP Western region (only GPS 2). The state-wide LTPP sections follows: California (15), Wyoming (8), Nevada (3), Arizona (2), Colorado (2), Montana (1), and Oregon (1). The IRI condition deterioration regression equations established in this study using historical data sets from 1990 to 2006. The enhanced condition deterioration prediction equation is verified using the actual data measured after 2006 (2007 to 2011) for test sections in Arizona, California, Montana, Oregon, and Wyoming. The formulation of the regression equation is similar to previous study by Mohamed Jaafar et al. (2015).
Dependent variable
In the enhanced dummy regression equation, average yearly IRI (average IRI values for both left and right wheel path) is selected as the dependent variable. The IRI values are measured with a minimum of five runs for each side. The processed yearly IRI data indicate approximately 46% of the IRI data are excluded from the database. Thus, the following methods are implemented to interpolate the missing yearly IRI data:
- If the initial yearly IRI data are not available, the missing data are assigned with the same IRI value as the first measured IRI data. For example, the yearly IRI data in 1990 and 1991 are unavailable, and the first measured data is in 1992. Therefore, the IRI in 1990 and 1991 are assumed similar to the IRI value in 1992.
- If the yearly IRI data are missing after the final year of the measured IRI, the subsequent years will have the same IRI value as the final measured IRI data. For example, the final yearly IRI data in 2004 are available. Thus the yearly IRI data for 2005 and 2006 are assumed similar to the yearly IRI data in 2004.
- If the IRI data are missing in between two measured yearly IRI data, for example the IRI data are measured in 1990 and 1992, but not in 1991, then the IRI value in 1991 is the average of IRI value measured in 1990 and 1992.
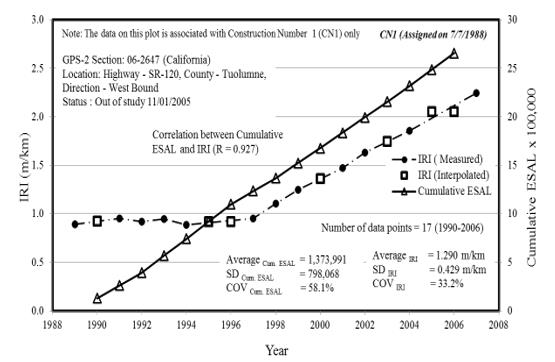
Figure 2 indicates the measured and interpolated IRI values for test section 06-2647 in the California, together with the cumulative ESAL traffic application data. A total of 17 data points are plotted and the IRI value in 1990 is interpolated by considering mean IRI value between 1989 and 1991. The IRI values for 1995 and 1996 are the average yearly IRI values between 1994 and 1997. If necessary, the yearly IRI value for 2008 is assumed similar to the yearly IRI in 2007. The ESAL data are the cumulative values of the total annual ESAL. The yearly IRI and the cumulative ESAL exhibit a strong correlation with R equal to 0.927.
Independent variable
Four independent variables of IRI0, cumulative ESAL, SN, and age are selected to develop the enhanced regression equation. Pre-processing of the yearly IRI data showed 48.5% of the annual ESAL traffic data are unavailable from the LTPP database. Therefore, the ESALs are determined based on the average annual rate of growth (AARG) concept (Mohamed Jaafar et al., 2015). The authors also described in detail each variable used in the prediction equations.
- Yearly IRI: The yearly IRI are between 0.319 m/km to 3.208 m/km, with an average value of 1.401 m/km. The Standard Deviation (SD) and Coefficient of Variation (COV) are 0.561 m/km, and 40.0%, respectively.
- The IRI0 has an average value of 1.274 m/km. The SD and COV are 0.374 m/km and 29.4%, respectively. The correlation between the yearly IRI and IRI0 was 0.464.
- Cumulative ESALs: The values range from 18,000 to 26,684,104 with an average value of 3,511,167. The SD and COV are 5,001,990 and 142.5%, respectively. The cumulative ESAL traffic and yearly IRI showed R value of -0.128. Cumulative ESAL data indicated higher variation as compared to the yearly IRI data.
- The average SN is 5.4 with the SD equal to 1.4. The calculated COV is approximately 26%. The SN ranged from 2.9 to 8.8. Repetitive traffic load impacts affected the IRI and structural capacity. A weak negative correlation between yearly IRI and SN (R = - 0.145) was observed. The IRI is relatively higher for a pavement structure with lower SN value.
- Pavement age: Range from three years (test section 56-7773, Wyoming in 1990) to 39 years (test section 06-7491, California in 2006) with an average value of 21 years. The SD and COV are both 7.5 years and 35.8%, respectively. The yearly IRI is positively correlates with pavement age with Pearson’s R equal to 0.197, which shows that the IRI increases with pavement age.
Description on the data used for IRI modeling in the Western region
- The data sets for 32 test sections are downloaded from the LTPP database and the IRI0 data are determined from the downloaded data sets.
- The IRI values from left and right wheel path from different runs are averaged and noted as yearly IRI. The missing yearly IRI data are determined as discussed in Figure 1. These statistics are computed for all test sections with IRI0 less than 2 m/km, except for the test sections 08-2008 and 08-7781, both at US 82 highway in Bent County, Colorado.
- A total of 32 LTPP test sections are analysed. The average IRI0 is 1.274 m/km with the SD of 0.374 m/km and the COV of 29.4%.
- The measured yearly IRI data from the database and the missing yearly IRI values estimated using AARG (Mohamed Jaafar et al., 2015) are considered in the analysis.
The example of the interpolated missing ESAL values and the annual cumulative ESALs are shown in Figure 3. Test section 06-2647 is in Tuolumne County, California. The interpolated annual ESAL showed constant increments, corresponding to positive AARG of 1.5%. A few test sections showed negative AARG values, resulted in the smaller interpolated traffic ESAL values.
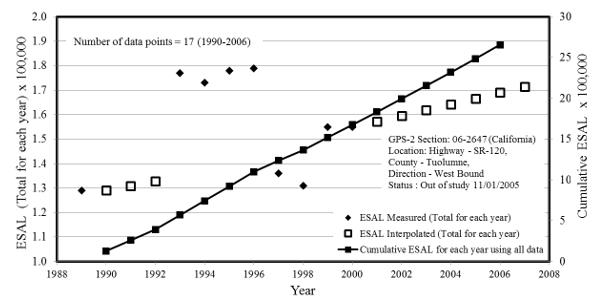
Table 1 shows the correlations between each of the variables. About 544 data sets are included (17 years x 32 test sections). The analysis discovered large variability in the yearly IRI data based on the COV value. The Pearson’s R, mean, SD, and COV values for IRI data shown are related to both measured and interpolated data.
The IRI0, Age, SN, and Cumulative ESAL indicated statistically significant correlations with the yearly IRI. All variables showed statistically significant correlations except for SN with IRI0 and SN with cumulative ESAL, respectively with p-value more than 0.05. In addition, the observed R values are less than 0.1. This resulted in no significant correlations between the variables. There are some variations in each variable depicted by COV less or equal to 40%. The exception is the cumulative ESAL with COV of about 142.5%, showing large variation in traffic volume data. Higher variation in the data sets will produce a better enhanced dummy regression equation.
Description on the construction number for the test section 041065 in Arizona
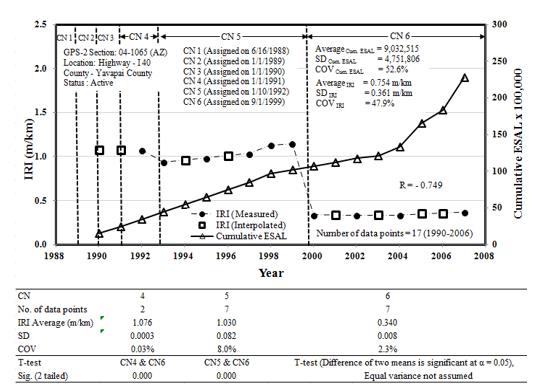
Previously, Figure 1 described the yearly IRI time series data for only one test section with original construction number (CN1). The yearly IRI value consistently increase every year except a slight decrease observed in 1992 and 1994. Commonly, majority of the test sections had more than one CN value. Only seven test sections remained at CN1. The remaining 25 test sections indicated more than one CN values. Four test sections recorded CN1 to CN6 (04-1065, 06-2002, 06-2040, and 56-5772). As an illustration, Figure 4 shows multiple CN values for section 041065, located at Interstate 40, in Yavapai County, Arizona. This test section recorded up to six construction numbers which as shown in Figure 4 plot. The vertical lines describe the year of each assigned CN value. For this test section, CN2 to CN3 were assigned after a local maintenance to patch the potholes was completed. In addition, CN4 and CN5 were assigned after the major maintenance of grinding, milling and surface overlay. These maintenance applications improved the road condition with smoother surfaces, thus reducing observed the IRI values. The IRI values at each subsequent CN decrease sharply as seen in CN5 and CN6 years. The yearly IRI values increase again until the subsequence maintenance and rehabilitation year. The yearly IRI and cumulative ESAL time series plot showed a strong correlation with R equal to -0.749.
Artificial Neural Network Modeling of IRI
The static, feedback, and dynamic ANN analysis was conducted to develop the ANN roughness prediction models. The static ANN is the simplest and the most widely used network. It is a multi-layered feed-forward neural network that is trained using an error-backpropagation algorithm (Najjar, 1990). In the analysis, the best network performance was achieved after 20,000 training iterations on all training data sets. The feedback ANN is like the static ANN, except an additional independent variable was introduced. The new independent variable is the predicted IRI values from the static ANN. The dynamic ANN involves sequential analysis of each data set. For this sequential analysis purposes, each data set was duplicated five times using Visual Basic for Application (VBA) codes in Microsoft Excel (Yasarer, 2013). Once the dynamic ANN analysis was completed, only the predicted IRI values from the fifth data sets for each test section were considered for comparison purposes.
Findings
Previous study by Mohamed Jaafar et al. (2015) proved that using the CN as a dummy variable increased the regression’s R value. Initially, Equation 2 was developed in this study without considering CN with R of 0.507.
Eq. 2
The CN indicates changes in all pavement layers due to major maintenance or rehabilitation treatment events and is a contributing factor for low R value of Equation 2. The CN1 was assigned to the specific test section included in the LTPP research program. The subsequent major or minor maintenance treatments changed the construction number to CN2, CN3 as mentioned by Mohamed Jaafar et al. (2015). The enhanced dummy regression equation that considered CN as a dummy variable was developed as described in Equation 3.
Eq. 3
The CND refers to the dichotomous (dummy) variable used to consider any major M&R treatments in the regression equation. Test sections with only minor M&R, for example patching potholes and compacted with truck tires, which is a local maintenance will be assigned CND equal to zero. For test sections with major M&R (milling and overlay process), the related CND is one. Without considering CN in the equation, the R value is 0.507, but when CND is introduced, the R value increased to 0.573. It is vital to consider the effect of CN related changes in the pavement structure. This statement is explained by an independent sample t-test described in Figure 4 table. The t-test compares whether there is statistically significant difference between the mean of the yearly IRI between CN4 with respect to CN6 mean, and CN5 mean with CN6 mean. The analysis indicates that p-values are less than alpha value 0.05 for both pairs. This confirms that the mean IRI values for CN4 and CN5 are statistically significant, compared to the mean IRI of data sets within CN6 period. This concept of using CN in the regression equation was not discussed in the MEPDG model development and implementation (FHWA, 2009).
Verification of the enhanced dummy regression equation for the Western region
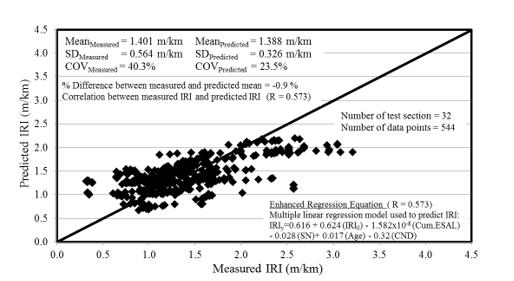
Figure 5 shows the predicted and measured IRI values for all 544 data points associated with 32 LTPP’s GPS 2 test sections used to develop enhanced dummy regression equation. The R of 0.573 is observed between the measured and predicted IRI values. The difference between the mean predicted IRI and the mean measured IRI is -0.9%. Therefore, the enhanced dummy regression equation fits the data reasonably well. A total of 39 measured IRI data sets from 20 test sections are verified with the predictions from the enhanced dummy regression equation as shown in Figure 6.
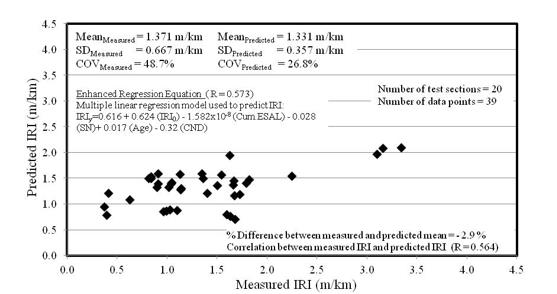
The correlation between the measured and predicted IRI is 0.564. The difference between the mean of the predicted and measured IRI is -2.9%. The enhanced dummy regression equation works considerably well for the GPS 2 test sections in the Western region. The measured and predicted mean IRI values are approximately the same but the predicted values show less variation.
Static, feedback, and dynamic ANN models
In developing the desired ANN models, the static and feedback ANN adopted similar number of training, testing, validation, and training all data sets as shown in Figure 07.
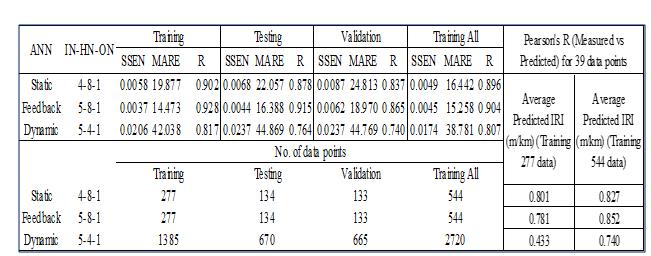
The numbers of the inputs, hidden nodes, and output layers are denoted by IN-HN-OH, respectively. All ANN types have IRI0, cumulative ESAL, SN, and age as the independent variables. The feedback and dynamic AAN models consider the predicted IRI values from the static ANN as the additional independent variable. The models are verified using the same data sets used to verify the enhanced dummy regression equation. Based on the information given in Figure 07, the feedback ANN is the best network to be used for future IRI predictions. The sum of squared error of prediction (SSEN) and the mean absolute relative error (MARE) for the feedback ANN model are the lowest compared with other ANN models. The R values (measured vs. predicted) are the highest compared to other ANN models. The static ANN showed fairly good predictions. However, the data sets used for model verification do not fit the dynamic ANN analysis approach. Further analysis was conducted to compare the IRI values predictions using 277 and 544 training data sets. The results showed that the prediction using training all 544 data sets indicated higher R values for all three ANN types. The ANN models were compared, and the key findings are summarized;
- The R of 0.852 was observed for feedback ANN compared to 0.807 and 0.740 for static and dynamic ANNs, respectively. The observed percent difference is 37.9% for feedback ANN, 39.7% and 46% for the static and dynamic ANNs, respectively.
- Comparisons between the mean measured and predicted IRI values show that the enhanced dummy regression equation gave better prediction with only -2.9% differences compared to the feedback ANN model minimum errors of 37.9%.
Therefore, for similar kind of data sets, it is recommended to use feedback ANN with training all data sets to predict future IRI values.
Comparison between other IRI model with the Western region enhanced dummy regression equation
Table 02 summarizes the R values and percent differences of the measured vs. predicted data sets for test sections in California and Wyoming. Meegoda and Gao (2014) equation in the literature review section was verified and compared with the enhanced dummy regression equation developed for the LTPP Western region in this study.
Data sets from the test sections in California and Wyoming were used to represent no-freeze and freeze climate zones, respectively (FHWA, 2006). The observed R values are 0.724 and 0.456 for Equations 1 and 3, respectively. However, the enhanced dummy regression equation developed in this study showed a better prediction with only 17.6% difference between the measured and predicted mean IRI values compared to the model developed by Meegoda and Gao (2014). Further analysis on the data sets from the test sections in Wyoming showed that the R values between 0.2 to 0.5. The enhanced dummy regression equation’s prediction is better with 25% difference compared with the prediction using Equation 1, approximately 213% difference from the mean measured IRI value. Equation 1 showed poor predictions since three out of six test sections verified (56-2015, 56-2017, 56-2020) recorded percent differences more than 300% each. The equation developed in this study provides a consistent prediction compared to other equation. Therefore, it is feasible to use the enhanced dummy regression equation for future IRI prediction.
Conclusion
The LTPP database is a reliable source for data collection used for pavement performance modeling studies. The study highlights the use of IRI as a long-term pavement performance index for maintenance and rehabilitation treatments. The key findings from the developed pavement roughness performance model for the Western region follow:
- The verification results of the enhanced dummy regression equation predictions for 39 data points had a mean difference of -2.9% as compared to the measured IRI value (average). Comparison with Meegoda and Gao (2014) equation indicated that the enhanced dummy regression equation showed a better prediction using the data sets for test sections in California and Wyoming.
- The feedback ANN provided a better prediction compared to other ANN models.
- The feedback ANN predictions using training all data sets showed higher R of 0.852 compared to the enhanced dummy regression equation. However, comparisons between the mean predicted IRI values showed that the enhanced dummy linear regression gave a better prediction compared to the feedback ANN model with the lowest error of 37.9%.
The study shows that consideration of ESAL and construction number are important independent variables for accurate and reliable IRI roughness model. Future work is under way to develop similar regression equation for other regions.
Acknowledgments
The main author appreciates the financial support funded by Universiti Sains Malaysia and Ministry of Education Malaysia (MOE) for his PhD study in the University of Mississippi, Oxford, Mississippi, USA.
References
AASHO. (1962). The AASHO Road Test, Report 5, Pavement Research, Highway Research Board Special Report 61E. Washington, D.C.: National Research Council.
AASHTO. (1993). AASHTO design guide for guide for pavement structures. American Association of the State Highway and Transportation Officials, Washington, DC.
Attoh-Okine, N. O. (1994). Predicting roughness progression in flexible pavements using Artificial Neural Networks. In Transportation Research Board Conference Proceedings, 1(1), 55-62.
Federal Highway Administration (FHWA). (2006). Long-term pavement performance (LTPP) data analysis support: National pooled fund study TPF-5 (013). Effect of multiple freeze cycles and deep frost penetration on pavement performance and cost.
Federal Highway Administration (FHWA). (2009). Guidelines for implementing NCHRP1-37A M-E Design procedures in Ohio: Volume 4 – MEPDG models validation and recalibration. Washington, DC.: U.S Department of Transportation.
Kargah-Ostadi, N., Stoffels, S., & Tabatabaee, N. (2010). Network-level pavement roughness prediction model for rehabilitation recommendations. Transportation Research Record: Journal of the Transportation Research Board, 2155(1), 124-133.
Madanat, S., Nakat, Z., Farshidi, F., Sathaye, N., & Harvey, J. (2005). Development of empirical-mechanistic pavement performance models using data from the Washington State PMS database. Research Rep.
Meegoda, J., & Gao, S. (2014). Roughness progression model for asphalt pavements using Long Term Pavement Performance data. Journal of Transportation Engineering, 140 (8).
Mississippi Department of Transportation (MDOT). (2013). Implementation of MEPDG in Mississippi-Draft Final Mississippi DOT Pavement M-E Design User Guide. Report FHWA/MS-DOT-RD-013-170 MDOT. Mississippi : Jackson.
Mohamed Jaafar, Z. F., Ahlan, M., & Uddin, W. (2015). Modeling of pavement roughness performance using the LTPP database for southern region in the U.S. In 6th International Conference Bituminous Mixtures and Pavements, Thessaloniki.
Najjar, Y. M. (1990). Quick manual for TR-SEQ1. Developed at Department of Civil Engineering. Manhattan, Kansas, USA. : Kansas State University.
Uddin, W., Hudson, W. R., & Haas, R. (2013). Public Infrastructure Asset Management. McGraw-Hill, Inc.
Yasarer, H. I. (2013). Decision making in engineering prediction systems. (PhD Thesis). Kansas State University. Manhattan, Kansas.
Copyright information

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
About this article
Publication Date
26 December 2017
Article Doi
eBook ISBN
978-1-80296-950-4
Publisher
Future Academy
Volume
2
Print ISBN (optional)
-
Edition Number
1st Edition
Pages
1-882
Subjects
Technology, smart cities, digital construction, industrial revolution 4.0, wellbeing & social resilience, economic resilience, environmental resilience
Cite this article as:
Jaafar*, Z. F. M., Uddin, W., & Najjar, Y. M. (2017). Pavement Roughness Modeling Using Regression And Ann Methods For Ltpp Western Region. In P. A. J. Wahid, P. I. D. A. Aziz Abdul Samad, P. D. S. Sheikh Ahmad, & A. P. D. P. Pujinda (Eds.), Carving The Future Built Environment: Environmental, Economic And Social Resilience, vol 2. European Proceedings of Multidisciplinary Sciences (pp. 536-548). Future Academy. https://doi.org/10.15405/epms.2019.12.53