
Accident Prevention Block to Move an Automobile From Traffic Collision


Abstract
Traffic accidents are one of the main reasons for the loss of lives around the world. To prevent traffic accidents and protect lives, many systems are being tried and implemented. A tired/sleepy automobile driver puts his life and other lives at risk, which may become fatal. An effective solution needs to be implemented to help the driver in the event of losing consciousness and move the vehicle to safety, to avoid any collision with traffic. This proposed solution is fueled by recent technological advancements like IoT (Internet of Things) and Machine Learning. In the present work, an attempt has been made to propose an accident prevention block in automobiles that can sense the tired/sleepy driver via a camera and algorithms, to maneuver the vehicle to safety. The camera is fixed on the steering wheel that is linked to the block. The automobile is controlled by APB in case of an emergency situation by interacting with the ECU, which in turn controls automobile speed and robotically brings it to the side of the road with the help of sensors. When the data inputs pertaining to the driver are received, the data from other sensors are retrieved and a decision could be arrived to ascertain whether the vehicle is in danger or could be a potential danger for other lives as well as the life of the driver. The development of an Accident Prevention Block (APB) is an effort to safeguard vehicles from accidents and save precious lives.
Keywords: Accident blockengine control unitmachine learningsafetysensorstraffic accident
Introduction
Traffic accidents are a major cause of death, injuries and property damage every year in the entire world. According to the World Health Organization’s (WHO) global report on road safety, road traffic injuries caused an estimated number of 1.35 million of death worldwide in 2016 (World Health Organization [WHO], 2018). Numerous attempts have been made to emphasise the importance of road safety by providing suitable side view mirrors, headlights, collision warning and lane departure systems. However, the precautionary measures and control on road safety have failed when the automobiles get faster even though they have much better safety features. Driving on curved roads (Jeong & Liu, 2019) require even more attention to prevent accidents. In addition, distracted driving (Pope et al., 2019), risky driving (Missikpode et al., 2019), fog weather conditions (Das et al., 2019), drivers with Alzheimer’s disease (Fang et al., 2018) have put the driver and the others at risk. Rear view cameras and parking sensors are largely employed to prevent the collision of vehicles (Cicchino, 2019). Several studies have also emphasised on the cognitive training methods (Molloy et al., 2019) to improve speed control in drivers. Thus, there is an urgent need for the use of intelligent driving systems to control and prevent accidents from occurring.
Total fatalities
The total fatalities in the world that occurred in the year 2016 has shown large amount of fatalities in Western pacific region and in South East Asia from the report on road safety (WHO, 2018). Even though some efforts have been successful that emphasised the usage of seat belts, bumpers, sensor networks and traffic monitoring to decrease the fatalities arising from accidents (Anil et al., 2014) the death rate continues to increase exponentially. The use of radiant energy detectors and externally and internally deployed air bags (U.S. Patent No. 5,646,613, Cho, 1997) to cause less damage to the automobile and driver have been focused long time ago with a reasonable amount of success.
Usage of software to prevent and control accident in automobiles
The fatigue level in a driver has been reported to be understood from the eye closure movements and yawning of the driver (Eduku, 2016). Vehicle tracking using GPS, eye blink sensors and activation of hazard warning lights to automatically stop the opposite vehicle have been controlled using software embedded systems (Sathyasri et al., 2019). Proteus software package, logit model, programming with C++, petri network and regression analysis have been used to prevent and control accidents (Chen & Shen, 2016; Eduku, 2016; Rezapour et al., 2019; Sane, 2016; Teslyuk et al., 2018).
Research background
Although innovative solutions to prevent traffic accidents are available most of them have one thing in common: They only alert the driver to take a break and sound an alarm if the driver is feeling sleepy by detecting the eye movements (Jeong & Liu, 2019) or lane departure occurrences (Cicchino, 2019). The response to the alert or alarm is fully dependent on the driver.
This is a great solution in some respects, however, suffers when the driver decides to either remove the system or if the driver decides to ignore the alert or alarm. The consequences can be life threatening. Hence intelligent software-controlled systems that can detect the visual stimuli without the control of the driver is needed to save valuable lives.
Problem Statement
Numerous cases of accidents have been reported, where the cause for accidents is drivers in automobiles (Calvi, 2015; Das et al., 2019; Jeong & Liu 2019; Molloy et al., 2019). Some of them include: Rear-end collision, Unsafe roads, Weather conditions, Curvature of roads, Speed infringement, Non license holder, Property damage, Loss of lives.
The need at hand
An effective solution needs to be implemented to help the driver in the event of losing consciousness and move the vehicle to safety, to avoid any collision with traffic. It requires better understanding than to monitor the eye movement and lane keeping performance of the driver. Some studies have also used skin- electrode interface to monitor the ECG, EEG and eye blinking in one device (Sun & Yu, 2014). The monitoring of ECG and EEG could cause discomfort to the driver. Thus, intelligent and smart speed-controlled software programs are an important practical implication that can be fixed on the seat belts to control and prevent the accident without causing discomfort to the drivers.
Research Questions
Some of the questions that were raised during the research included:
How good are the other existing system(s) in protecting the driver?
Is the existing system(s) efficient?
Will the system succeed where other types of systems fail?
What does the system do exactly?
Purpose of the Study
This proposed solution is fuelled from the recent technological advancements like IoT (Internet of Things) and Machine Learning. And the solution tries to improve the existing shortfalls in alerting mechanisms and provide a complete controlled action in case of a detected change in behaviour of driver, due to fatigue or adverse influences and with inputs from multiple data sources and not rely on only one source of data.
Research Methods
This proposed solution uses multiple data inputs – primarily about the driver and then about the parameters which are getting influenced on the automobile due to the adverse action of the driver. When the data inputs pertaining to the driver are received, quickly the data from other sensors are retrieved and a decision could be arrived to ascertain whether the vehicle is in danger or could be a potential danger for other lives as well as the life of the driver.
So, the APB unit comes into action to control the vehicle via the ECU and take necessary actions to safeguard the vehicle. It consists of an accident prevention block (APB) that is connected to the ECU (Engine Control Unit), that can be used to monitor the speed of the vehicle and the relative position of the vehicle with respect to lane and traffic. Cameras are positioned both on the inside and the outside of the vehicle, to get a clear view of the road and the driver. The cameras on the inside capture a multi-dimensional view of the driver to improve the accuracy of analysing the eye patterns and head motions.
If the driver starts to feel tired (Thiffault & Bergeron, 2003), the proposed block in the present study can sense it via the camera attached on the dash (Varma et al., 2012) and steering wheel. Using the connections with the accelerator and brake and the steering wheel the vehicle first checks the surroundings using the cameras and the sensors on the outside and detects whether there are any vehicles in the vicinity. When the surroundings are safe, the hazard symbol and the corresponding indicator (left or right) gets initiated in an alternating pattern and the automobile could be pulled over safely and simultaneously. In addition, an alert could be sent to the emergency contacts that are stored in the app that can be installed on the phone if necessary, with the GPS coordinates.
Inputs
-
Camera
-
Dashboard camera to analyse eye patterns
-
Cameras at every point around the vehicle to get the 360-degree view around the vehicle and lane positions
-
-
Sensors
-
Heart rate monitor in seat belt (to capture variations in heart rate)
-
Sense objects around the vehicle (360-degree)
-
Sense the lane markings (to capture vehicle veering)
-
Seatbelt usage
-
Analysis-for aspects of fatigue, lane violations, degree of movement
-
Algorithms
-
YOLO algorithm for object detection
-
Cascaded CNN (Convolutional Neural Networks) for eye pattern detection
-
-
Decision Tree with Machine Learning
Output
-
Light alerts (alternating hazard indicator – left/right)
-
Text alerts, app alerts with GPS coordinates
-
Control ECU to move vehicle to safe shoulder on the road
Yolo algorithm
The YOLO (You only Look Once) algorithm is a real-time object detection algorithm to detect common objects like people and animals and is a very efficient Machine Learning algorithm. This algorithm scans the entire image into one big neural network. The YOLO algorithm then predicts every possible bounding box (an area where the object possibly lies) and the confidence that a certain object is there (i.e. an automobile, person, etc.) then based on the confidence (probabilities) it narrows down the bounding boxes to its final output (Redmon et al., 2016). This is the reason why it is majorly used to detect objects. The advantages of using this algorithm are:
Speed of 45 FPS (Frames Per Second) which is better than real time object detection.
There is a faster version of YOLO which processes images at 155 FPS but less accurate.
It is faster than algorithms like R-CNN and Fast R-CNN since it looks at the entire image.
Another algorithm that was used is the Cascaded CNN which was used to detect eye patterns of the driver (Fu et al., 2016; Li & Fu, 2018). The way it works was that from the image of the face it detects the eye region of the driver to monitor the movement of eye. If any distortions in the region of the eye for a certain number of seconds are noticed, it means the driver is tired and sleepy and sends the message that the block needs to override control.
Data from seatbelt sensors are used to track the heartbeats and any irregularities in the same. This may not always provide the accurate measurement considering the other environmental noise. Hence this data input was not used as the primary for any decision making.
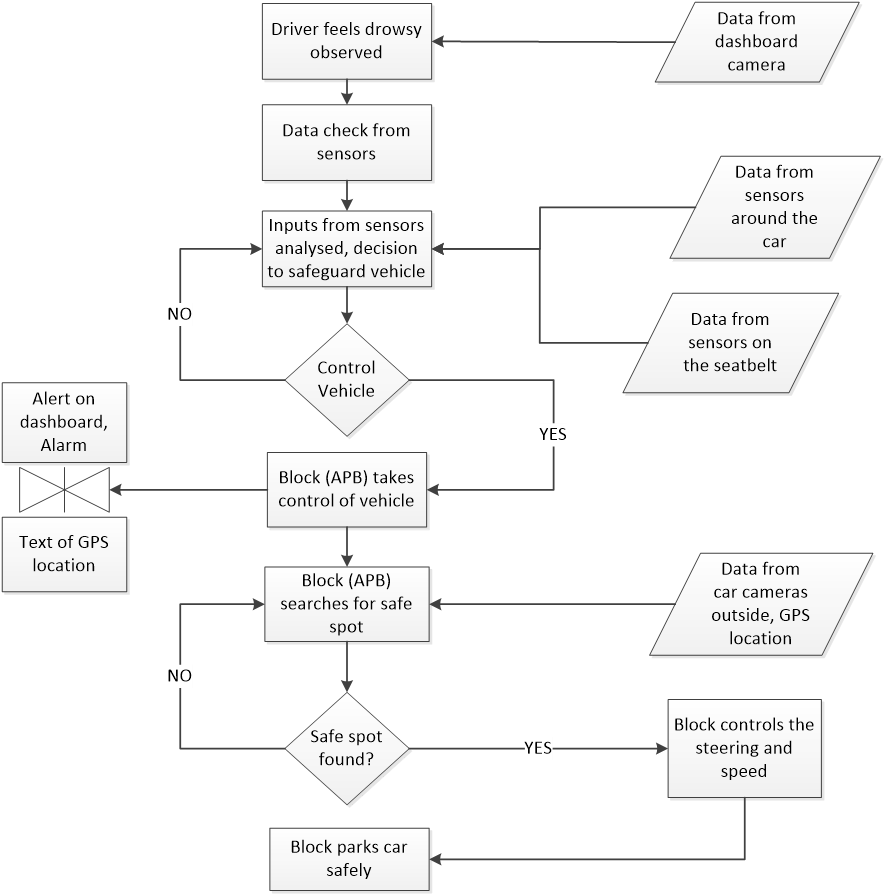
The flowchart in Figure
Based on the decision tree values, if the decision is to control the vehicle, the block takes control of the vehicle and an alert on the dashboard and alarm is sounded along with a text of the GPS location using the GSM signal in the vehicle.
Then, the block searches for a safe spot (typically a road shoulder) using the sensors and cameras around the vehicle. Once the safe spot is found, by controlling the steering and speed of the vehicle it is brought to the safe spot, to make the vehicle stationary.
Findings
Efficiency of the proposed new system
To overcome the limitations in existing solutions, a new solution was proposed since it is not just enough to alert, but act without the intervention of the driver and initiate multiple actions. It could ultimately bring down the probability of occurrence of accident, due to fatigue or sleepiness of the driver caused by physiological factors (Sathyasri et al., 2019). This solution was not intended to enable self-driving of the vehicle.
The new system is a proposal and therefore needs verification to prove its effectiveness on actual driving scenario. The proposal has been theoretically studied and is expected to show good control over the prevention of accident. The advantage of the present proposal is that it eliminates the control of the driver on the sensory alarm systems and uses multiple inputs to decide for action and initiates external alerts which can be very helpful in other allied actions. Architectures based on IoT have been studied to prevent accidents in construction sites (Kanan et al., 2018). Since this is a theoretical proposal of a more efficient system compared to the existing systems, the approach has been aimed to utilize the best available options, leverage on the latest concepts (like IoT) in the industry and also foresee the improvements possible in this system in the coming years and be able to make it practically viable as an established system.
Success of the proposed system
No system is 100% fool proof. There will always be things that can go wrong, occurrences which cannot be anticipated. Prevention of accidents caused by drunken driving has been studied based on the internet of things concept using Raspberry Pi 3 model B (Sandeep et al., 2017). In the present proposal it has been attempted to enhance the available methods and have an effective system to prevent accidents due to driver’s fatigue caused by adverse influences. The proposed system considers multiple inputs which will help to arrive at a better action, rather than depend on only one input.
What the proposed system does
The proposed new solution consists of an accident prevention block (APB) that is connected to the ECU (Engine Control Unit), that can be used to monitor the speed of the automobile and the relative position of the automobile with respect to lane and traffic and take control when a drowsy driver is detected and when the relative position of the vehicle oscillates more than the normal limit. The proposed system also automatically tracks heart rate of the driver, without the need for any physical device strapping (heart rate inputs are recorded from sensors on the seat belts). Multiple inputs like vehicle’s relative position, driver’s eye movement and heart rate are considered as inputs to take the right decision.
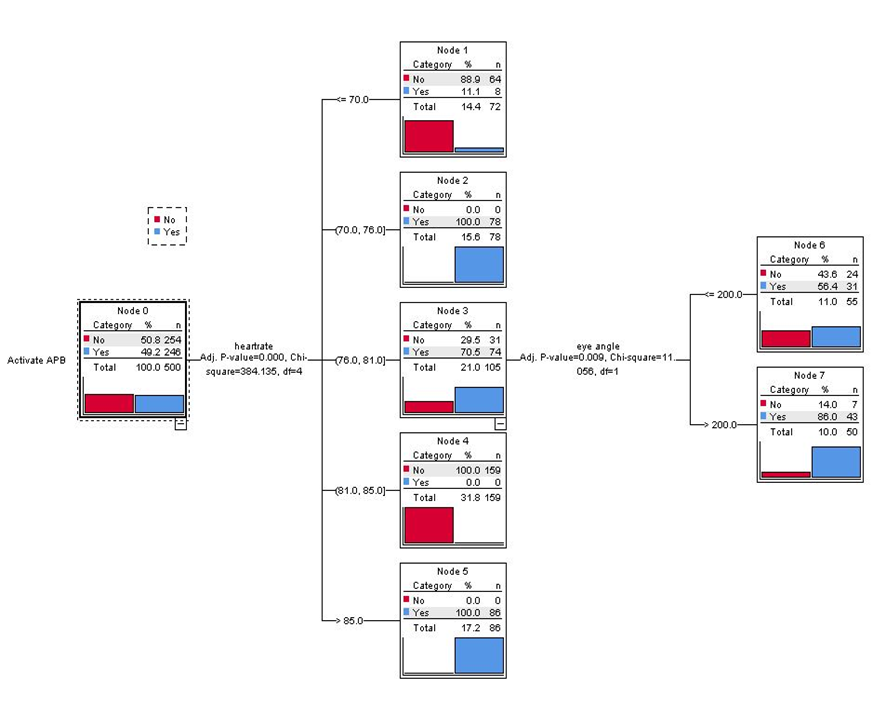
Studies on prevention of accidents caused due to drowsiness were studied using an eye blink sensor (Li & Fu, 2018) in automobiles and validated using Proteus software and programming language C ++ (Eduku, 2016). In the present study, the core of the APB was a decision tree that inferred on the action to be taken, based on the inputs from the various sensors and as per the flow mentioned in Figure
Based on the decision that was arrived, the APB takes control and reduces the speed of the automobile and maintains a constant safe speed by controlling the engine control unit. The APB takes over the control of the vehicle to ensure stopping in a safe place. Safe place is arrived by considering the traffic and place availability and not an abrupt stop. Also, in parallel, the communication units in the vehicle can transmit the GPS location of the vehicle and the text of the issue in the vehicle. Detection of accidents by vehicle tracking (Sane, 2016) has been studied using the GPS with a fair amount of success. After the vehicle gets parked safely, upon retrieval, the APB override can be disabled only through proper admin controls. The decision tree shown in Figure
The core of testing the proposed system was via the decision tree in Figure
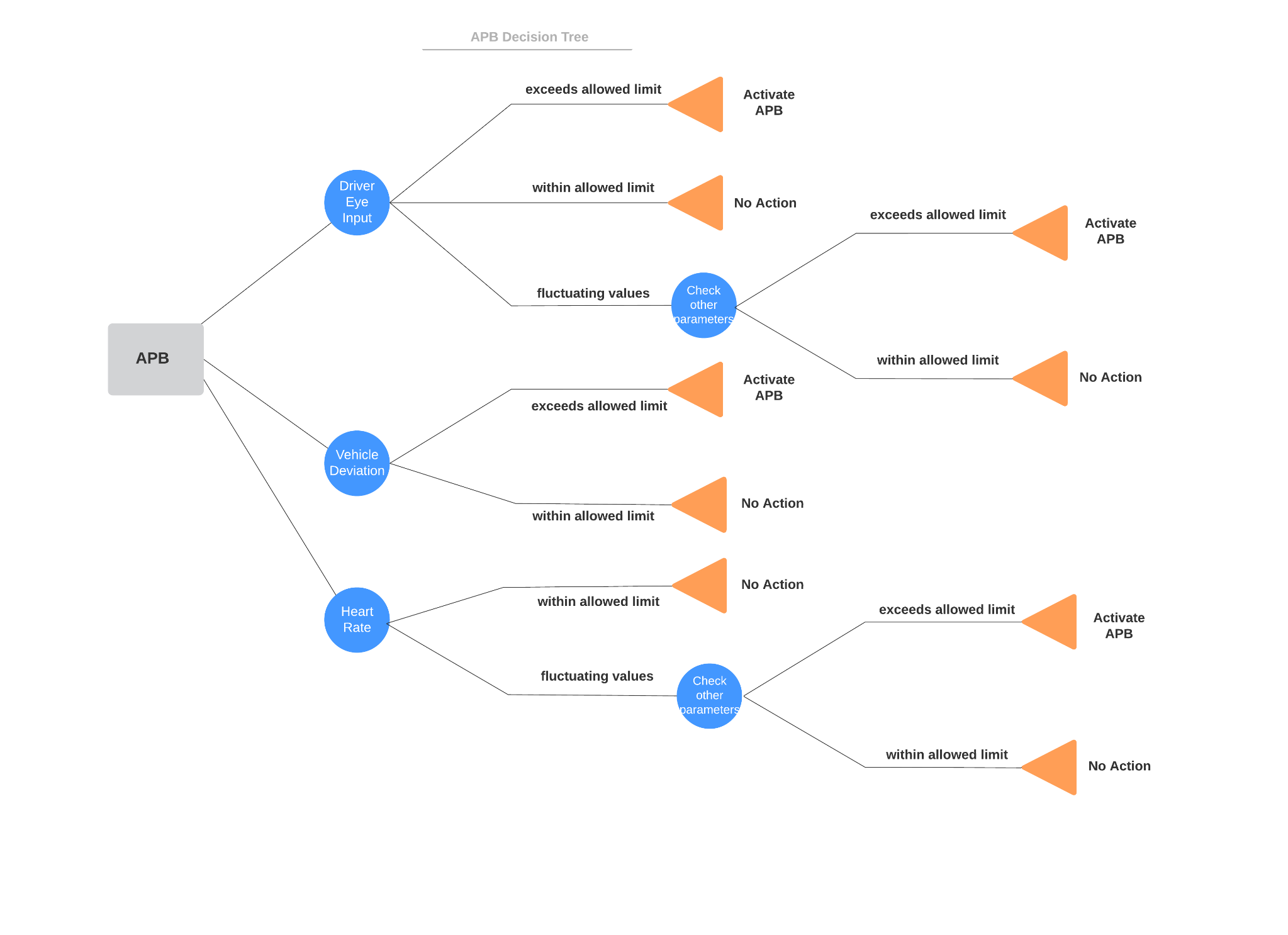
The simple working of the APB is given in Figure
Driver’s eye pattern (from the camera)
Heart rate of the driver (from the seatbelt sensor)
Deviation of the vehicle with respect to the lane (from the sensors and cameras outside)
Each parameter is analysed and if any one of them fluctuates (Driver’s eye is looking sleepy, Vehicle is veering from the lane marking, etc.) it leads to the activation of the APB. With respect to each input an explanation is given as to what are the threshold levels:
If the eye angle of the driver is closer to 180 degrees, it means the driver is feeling a bit sleepy (we can find that with the help of Cascaded CNN)
When a person is feeling sleepy the heart rate normally slows down and if it is much lower than the resting heart rate of around 69 BPM (Beats Per Minute), it is a warning sign.
The sensors are used to find if the vehicle is moving unintentionally wide from the lane with or without knowledge of the driver.
These parameters change for each person and that’s why Machine Learning is used to tailor to each driver’s patterns.
Conclusion
In conclusion, the development of an Accident Prevention Block (APB) is an effort in the right direction to safeguard vehicles from accidents and save precious lives. This solution covers a wider source of data to arrive at decisions and takes necessary action not only to communicate about the impending danger, but also alert and control the vehicle, not leaving it to the judgement or assumption of the driver.
The main contribution of the APB is to digest multiple sources of data and control the vehicle according to the decision tree outputs and with multiple alerts, ensuring that no action in case of an impending disaster, is left out.
Limitation of this proposal is in terms of the capability of each vehicle to be able to be compatible with APB and be able to ingest all the sources of data and control the vehicle. Also, the layout of each vehicle will influence the ability of the APB solution to be implemented as planned, considering position of sensors, other factors influenced in the layout of the vehicle.
Future work
Use of Artificial Intelligence (AI) in the algorithms to enhance the data interpretation and be able to predict various behaviours based on additional data points. Enhanced edge computing capabilities can be introduced by AI. This solution can also be used to enhance the self-driven vehicle concept, to improve the safety of the vehicle and people.
Acknowledgments
The author gratefully acknowledges with thanks, the support from St. Joseph’s College of Engineering, Old Mahabalipuram Road, Kamaraj Nagar, Semmancheri, Chennai 600119.
References
- Anil, M. D., Sangeetha, S., Divya, B., Niranjana, B., & Shruthi, K. S. (2014). Advanced Railway Accident Prevention System Using Sensor Networks. International Journal of Advanced Research in Computer and Communication Engineering, 3, 6730-6732.
- Calvi, A. (2015). A study on driving performance along horizontal curves of rural roads. Journal of Transportation Safety & Security, 7, 243–267. https://doi.org/10.1080/19439962.2014.952468
- Chen, P., & Shen, Q. (2016). Built environment effects on cyclist injury severity in automobile-involved bicycle crashes. Accident Analysis and Prevention, 86, 239-246. https://doi.org/10.1016/j.aap.2015.11.002
- Cho, M. (1997). U.S. Patent No. 5,646,613. U.S. Patent and Trademark Office.
- Cicchino, J. B. (2019). Real-world effects of rear automatic braking and other backing assistance systems. Journal of Safety Research, 68, 41-47. https://doi.org/10.1016/j.jsr.2018.12.005
- Das, A., Ghasemzadeh, A., & Ahmed, M. M. (2019). Analysing the effect of fog weather conditions on driver lane-keeping performance using the SHRP2 naturalistic driving data. Journal of Safety Research, 68, 71-80. https://doi.org/10.1016/j.jsr.2018.12.015
- Eduku, S. (2016). Design and Construction of vehicle accident prevention system using eye blink sensor. International Journal of Emerging Technology and Innovative Engineering, 2, 434-447.
- Fang, C. W., Lin, C. H., Liu, Y. C., & Ou, Y. K. (2018). Differences in road-crossing decisions between healthy older adults and patients with Alzheimer’s disease. Journal of Safety Research, 66, 81-88. https://doi.org/10.1016/j.jsr.2018.06.003
- Fu, H., Wei, Y., Camastra, F., Arico, P., & Sheng, H. (2016). Advances in Eye Tracking Technology: Theory, Algorithms, and Applications. Computational Intelligence and Neuroscience, 2016, Article ID 7831469, 2 pages. https://doi.org/10.1155/2016/7831469
- Global status report on road safety 2018. Geneva: World Health Organization; 2018. (https://www.who.int/violence_injury_prevention/road_safety_status/2018/English-Summary-GSRRS2018.pdf)
- Jeong, H., & Liu, Y. (2019). Effects of non-driving-related-task modality and road geometry on eye movements, lane-keeping performance and workload while driving. Transportation Research Part F, 60, 157-171. https://doi.org/10.1016/j.trf.2018.10.015
- Kanan, R., Elhassan, O., & Bensalem, R. (2018). An IoT-based autonomous system for workers' safety in construction sites with real-time alarming, monitoring, and positioning strategies. Automation in Construction, 88, 73-86. https://doi.org/10.1016/j.autcon.2017.12.033
- Li, B., & Fu, H. (2018). Real Time Eye Detector with Cascaded Convolutional Neural Networks. Applied Computational Intelligence and Soft Computing, 2018, Article ID 1439312, 8 pages. https://doi.org/10.1155/2018/1439312
- Missikpode, C., Peek-Asa, C., McGehee, D. V., & Wallace, R. (2019). Classifying and predicting risky driving among novice drivers: A group-based trajectory approach. Journal of Safety Research, 68, 215-222. https://doi.org/10.1016/j.jsr.2018.10.014
- Molloy, O., Molesworth, B. R. C., & Williamson, A. (2019). Which cognitive training intervention can improve young drivers speed management on the road. Transportation Research Part F, 60, 68-80. https://doi.org/10.1016/j.trf.2018.09.025
- Pope, C. N., Mirman, J. H., & Stavrinos, D. (2019). Adolescents perspectives on distracted driving legislation. Journal of Safety Research, 68, 173-179. https://doi.org/10.1016/j.jsr.2018.12.013
- Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016). You Only Look Once: Unified, Real Time Object Detection. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 779-788). http://pjreddie.com/yolo/
- Rezapour, M., Moomen, M., & Ksaibati, K. (2019). Ordered logistic models of influencing factors on crash injury severity of single and multiple-vehicle downgrade crashes: A case study in Wyoming. Journal of Safety Research, 68, 107-118. https://doi.org/10.1016/j.jsr.2018.12.006
- Sandeep, K., Ravikumar, P., & Ranjith, S. (2017, July). Novel drunken driving detection and prevention models using Internet of things. In 2017 International Conference on Recent Trends in Electrical, Electronics and Computing Technologies (ICRTEECT) (pp. 145-149). IEEE. https://doi.org/10.1109/ICRTEECT.2017.38
- Sane, N. H. (2016). Real time vehicle detection and tracking using GPS and GSM. International Journal on Recent and Innovation Trends in computing and communication, 4, 479-482.
- Sathyasri, B., Hemavathi, R., Kavya, S., Preethi, P., & Vijayarakshana, R. (2019). Autonomous Cruise Control and Accident Prevention of Vehicles using Arduino. International Journal of Recent Technology and Engineering, 7, 166-169.
- Sun, Y., & Yu, X. (2014). An innovative nonintrusive driver assistance system for vital signal monitoring. IEEE Journal of Biomedical and Health Informatics, 18, 1932-1939. https://doi.org/10.1109/JBHI.2014.2305403
- Teslyuk, V., Beregovskyi, V., Denysyuk, P., Teslyuk, T., & Lozynskyi, A. (2018). Development and implementation of the technical accident prevention subsystem for the smart home system. International Journal of Intelligent Systems and applications, 1, 1-8. https://doi.org/ 10.5815/ijisa.2018.01.01
- Thiffault, P., & Bergeron, J. (2003). Monotony of road environment and driver fatigue: a simulator study. Accident Analysis and Prevention, 35, 381-391. https://doi.org/10.1016/S0001-4575(02)00014-3
- Varma, A. R., Arote, S. V., Bharti, C., & Singh, K. (2012). Accident Prevention Using Eye Blinking and Head Movement. Emerging Trends in Computer Science and Information Technology (ETCSIT2012), Proceedings published in International Journal of Computer Applications (IJCA), 18-22.
Copyright information

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
About this article
Publication Date
12 October 2020
Article Doi
eBook ISBN
978-1-80296-088-4
Publisher
European Publisher
Volume
89
Print ISBN (optional)
-
Edition Number
1st Edition
Pages
1-796
Subjects
Business, innovation, sustainability, environment, green business, environmental issues, urban planning, municipal planning, disasters, social impact of disasters
Cite this article as:
Rajiv, C. S. (2020). Accident Prevention Block to Move an Automobile From Traffic Collision. In N. Samat, J. Sulong, M. Pourya Asl, P. Keikhosrokiani, Y. Azam, & S. T. K. Leng (Eds.), Innovation and Transformation in Humanities for a Sustainable Tomorrow, vol 89. European Proceedings of Social and Behavioural Sciences (pp. 200-209). European Publisher. https://doi.org/10.15405/epsbs.2020.10.02.19