
Project-Based Integration Of Robotics Platforms Into Educational Process In Universities

Abstract
There is a lack of a number of relevant technologies relevant to modern development of curriculum in robotics for secondary and higher educational institutions in Russia. In the presented work, the question of the creation educational materials on robotics, mechatronics, control theory and the introduction of a design-based learning in the teaching of robotics is being studied. Ultra-mobile chassis for service robots that can overcome obstacles up to a meter in height was developed. It has open hardware and software architecture and can be a platform for student start-ups, experiments, diploma works. Simple integration with other existing technologies and algorithms for mobile robots. Simulation environment for virtual programming of each hardware complex is provided. Educational and methodological materials and laboratory work on robotics, control theory, mechatronics, mathematical modeling. Separation of tasks, the joint construction of a mathematical model and the programming of a complex robotic system. The main emphasis in training is on the solution of model problems, the project approach is widely used. Such tasks can become a basis for individual course and diploma papers, for example, creating robots for the various scenarios. This educational platform is tested in the course "Introduction to Robotics and Artificial Intelligence" at the Kuban State University, Krasnodar.
Keywords: Robotics,education,project-based learning
Introduction
The market of robotics is a dynamically developing world market. According to the National Association of Robotics Market Participants, the robotics market is divided into segments of industrial and service robotics. In both segments of the market there is a steady growth. In industrial robotics from 2010 to 2014 the average growth in sales per year was 17% (World Robotics Market Analysis, 2016).
According to the International Federation of Robotics (IFR), a significant growth of all segments of the robotics market is forecasted: sales of industrial robots in 2018 are expected at 400 thousand units, sales of service robots for professional use for the period 2015-2018 will amount to 152,375 units and $19.6 billion, and sales of service robots for personal use will amount to 35 million units and $ 12.2 billion. According to the estimates of the analytical group Myria Research, 2015 - the market of robotics and intelligent operating systems, as well as their ecosystem, including hardware, software and services, will reach a level of more than $320 billion by 2020.
In Russia, there is also growth in the segment of robotics. According to the International Federation of Robotics (Statistics – IFR, 2015), there is a clear trend towards the use of domestic industrial robots, increasing year by year [Fig. 1].
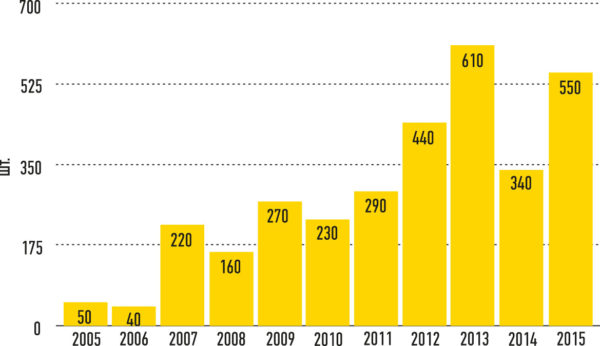
According to NAUMP, the level of use of industrial robots in Russia is still lower than in other countries, which still has great possibilities for modernization and robotization of production in order to increase its efficiency and competitiveness.
Problem Statement
This means that in Russia it is possible to forecast the growth of the need for specialists in the field of programming, setting up and servicing the robots, which will ensure the need for qualified specialists in the near future. And this means the great need in the educational sets for laboratory works and teaching sets, which allow the educational institutions to prepare the appropriate personnel.
Currently, there is a lack of a number of relevant technologies relevant to modern development of curriculum in robotics for secondary and higher educational institutions in Russia..
Research Questions
In the presented work, the question of the creation educational materials on robotics, mechatronics, control theory and the introduction of a design-based learning in the teaching of robotics is being studied. Robotics is at the intersection of several specialties, so it is important to break up bulk projects into sub-tasks and group training.
Also within the framework of this work, students are taught to create modular educational platforms relevant to industrial tasks using the example of mobile autonomous robots that can move around and orient themselves in a stochastic environment that is not prepared beforehand, for a human being.
Purpose of the Study
Ultra-mobile chassis for service robots that can overcome obstacles up to a meter in height was developed.
It has open hardware and software architecture and can be a platform for student start-ups, experiments, diploma works. Simple integration with other existing technologies and algorithms for mobile robots (Riadchykov et al, 2016).
Simulation environment for virtual programming of each hardware complex is provided.
Educational and methodological materials and laboratory work on robotics, control theory, mechatronics, mathematical modeling. Separation of tasks, the joint construction of a mathematical model and the programming of a complex robotic system.
The platform can be equipped with various software platforms which is typical to educational robots (Riadchykov et al, 2017a and 2017b; Pluzhnik & Nikulchev, 2014):
Robotics controller TRIK and TRIK Studio - for schoolchildren. Visual programming and Javascript interpreter
Scratch ROS - the market standard for school children
ROS API - for full programming. Models for Matlab, Gazebo, V-REP
Nvidia Jetson TK1 controller - for computer vision and neural networks
Research Methods
Sets for laboratory work are developed:
• Non-anthropomorphic robot - 2 manipulators and stabilization system. One set per group of 15 people. Joint programming of complex behavior.
• One-dimensional stand with stabilization system - reverse pendulum with flywheel. Ability to adjust the lever and mass. One set per pupil.
• Two-dimensional stand with stabilization system - reverse pendulum with two flywheels. One set per group of two students.
• Stabilization system with one flywheel. One set for two students.
• Stabilization system with two perpendicular flywheels. One set for two students.
• Leg as a manipulator with 6 degrees of freedom and the ability to fasten the instrument. One set per group of five students.
• A cube that stabilizes on an edge and a corner with 3 flywheels. One set per group of five students.
• Two-dimensional stand with stabilization system - reverse pendulum with two flywheels with biased centers of inertia. One set per pupil.
• Trolley with one wheel, one flywheel and a line sensor. One set per pupil.
• Balancing trolley with two wheels. One set per pupil.
• Reverse pendulum on a trolley with 1,2,3 links and a camera. One set per group of ten students.
• Rotating reverse pendulum with 1.2 links and encoders. One set per pupil.
• Swing - "saw" with the reverse pendulum on the trolley. One set per group of ten students.
The main emphasis in training is on the solution of model problems, the project approach is widely used. Such tasks can become a basis for individual course and diploma papers (Riadchykov et al, 2017a) , for example, creating robots for the following scenarios:
• Work in a hazardous environment
• Patrolling, monitoring of complex industrial facilities
• Industrial operations, Industry 4.0
• Robot promoter, conductor, salesman
• Tele-control, telepresence
• Garbage collection in urban conditions and rough terrain
• Driven version, super-rough terrain tourism
• Work with low and absent gravity
Findings
In particular, the developed project fits the category of training equipment in the All-Russian Classifier of Products by Economic Activity OK 034-2007 (CPEA 2002), corresponds to the codes: 36.63.74 - instruments, equipment and models intended for demonstration purposes.
Educational programs for schoolchildren and undergraduate students have been developed. The platform can be used in teaching a range of educational programs: mechatronics, electrical machines and mechanisms, synthesis of control systems, stability theory, cybernetic physics, systems engineering, methods of artificial intelligence in mechatronics and robotics, automated control and production systems, adaptive and robust control of nonlinear systems , dynamics of robotic systems, digital control systems and general robotics..
Conclusion
This educational platform is tested in the course "Introduction to Robotics and Artificial Intelligence" at the Kuban State University, Krasnodar. Also, this solution was introduced into the educational process in the federal educational techno-park "Quantorium Mosgormash", Moscow. Usisg this platform in the educational process allows the tutors to master a wide range of competencies in groups of students gathered from different specialties. That, in turn, develops the skills of teamwork and other cross-disciplinary competences.
Acknowledgments
The work was carried out within the framework of the state task of the Ministry of Education and Science, project No. 8.2321.2017 “Development and adaptation of control systems for compensation of dynamic deflecting effects on mobile objects in a state of dynamic equilibrium”.
References
- NARMP: World Robotics Market Analysis (2016). URL: http://robotforum.ru/assets/files/000_News/NAURR-Analiticheskoe-issledovanie-mirovogo-rinka-robototehniki-%28yanvar-2016%29.pdf
- Myria market research: the Chief Robotics Officer, (2015) URL: http://myria-research.com/wp-content/uploads/2016/09/Myria-Scenario_The-Chief-Robotics-Officer_Jan15_2015.pdf
- Statistics - IFR International Federation of Robotics: World Robotics (2015) Industrial Robots, 2016. URL: http://www.jiqiren365.com/uploadfile/2016/0216/20160216025425270.pdf
- Pluzhnik, E. & Nikulchev, E (2014) Virtual Laboratories in Cloud Infrastructure of Educational Institutions. In 2nd International Conference on Emission Electronics (ICEE), 67-69.
- Riadchykov, I., Sechenev S., Sinitsa, S., Nikulchev E. (2016) Constructive solution of the robotic chassis AnyWalker, ITM Web of Conference, 6, 01003
- Riadchykov, I., Sechenev, S., Sinitsa, S., ... & Nikulchev, E. (2017) Design and Control of Self-Stabilizing Angular Robotics Anywalker. International Journal of Advanced Computer Science and Applications, 8(9), 29-34
- Riadchykov, I., Sechenev S., Svidlov A., Sinitsa, S.s, Nikulchev E. (2017) Development of a Self-Stabilizing Robotic Chassis for Industry, MATEC Web of Conferences 99, 02007
Copyright information

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
About this article
Publication Date
13 December 2017
Article Doi
eBook ISBN
978-1-80296-032-7
Publisher
Future Academy
Volume
33
Print ISBN (optional)
-
Edition Number
1st Edition
Pages
1-481
Subjects
Cognitive theory, educational equipment, educational technology, computer-aided learning (CAL), psycholinguistics
Cite this article as:
Ryadchikov, I., Sechenev, S., Svidlov, A., Sinitsa, S., Volkodav, P., Mamelin, Y., Popko, K., & Nikulchev, E. (2017). Project-Based Integration Of Robotics Platforms Into Educational Process In Universities. In S. B. Malykh, & E. V. Nikulchev (Eds.), Psychology and Education - ICPE 2017, vol 33. European Proceedings of Social and Behavioural Sciences (pp. 299-303). Future Academy. https://doi.org/10.15405/epsbs.2017.12.30