
An Investigation of Workability Experiment for Crowd in 3600 Panoramic View on Mobile Platform


Abstract
In the computer graphics industry, there is a great demand for cost and time effective simulation and rendering while meeting an acceptable level of realism. Hardware based simulation and rendering has been taken to another degree of low level of details in environment modelling with grandeur of peoples. This paper presents an investigation to find out the feasibility of deploying crowd in 3600 panoramic view using the mobile platform as the case study. First, the crowd are modelled through some modifications to the Newtonian Laws, inclusion of proxy agents, speed control and turning. Second, workability tests experiments are carried out concerning the preferred parameters for each agent, improvement on random movements of the crowd and dynamicity, with the capability of collision avoidance. Finally, this investigation is discussed and has proposed some solutions in handling crowd in 3600 panoramic view on mobile platform.
Keywords: Crowd simulationpanoramic viewdigital heritagemobile platform
Introduction to Motion Variety
Crowd are commonly modelled and simulated in environment of a virtual city, stadium, theatre, museum, airport, religious ceremonies and others. However, it is not normally available in panoramic views. People or crowd in panoramic views is usually static since they are captured together with the environment and the crowd is not animated. In order to strengthen the contextual information in the 3600 panoramic view, dynamic crowd modelling is vital to augment the user’s perception and interpretation of the present life in the case study of digital cultural heritage sites on mobile platform. In this paper, a force-driven crowd model based on Newtonian Laws is investigated specifically for 3600 panoramic view in order to bring another aspect of present life into digital cultural heritage on mobile platform and it is evaluated later on through experiments and scenario-based visual observations. Through the investigations, improvement of movement of crowd in virtual heritage within an environment of 3600 panoramic view is proposed on mobile platform model in three folds:
MOVEMENT {None, Go to random places}
ANIMATION {Stop, Walk, Turn, Look around}
INTERACTION {Detect, Avoid}
Preliminary Study
All animation, movement and interaction of crowd are dependent on certain specific rules. On one hand, when determining the rules to motivate movements, social and psychological aspects are considered. Interactions between agents can be more interesting when the complexity of the behaviours is increased (Cherif, & Chighoub, 2010; Sakellariou, 2012; Ondrej et al, 2010; Patil et al, 2011). In modelling crowd in 3600 panoramic view on mobile platform, the application of rule-based (Bogdanovych et al, 2012; Rodriguez, 2010; Takahashi et al, 2009), particle based (Tasse et al, 2009) and social-force based models (Guy et al, 2011) have produced different types of movements over years. Some agent can walk faster while some agents walk slower. The agent has a force and will walk and stop when there is no more motivating force. The force can be renewed and the agent will continue walking again. On the other hand, the animation process will show a clear interaction between crowds that they are able to move and reach their heterogeneous goals in as random as possible manner. Therefore, there is a need to propose a crowd model in which the movements of the crowd can be incorporated into the collision detection and avoidance interactions within the 3600 panoramic view. Besides, various scenarios for instance in digital cultural heritage sites can be simulated by applying randomness to the models for active crowd management in 3600 panoramic view.
Methodology
This section presents a three phases methodology that begins with the preliminary study and followed by the implementation, and workability test and discussions as shown in Figure

In the first phase, background of the agent movements and generations are studied in detail. There were three Newtonian Laws that are strictly included and later used in the implementation phase. Some modifications were made to the Newtonian Laws to meet the goal of modelling the crowd in panoramic view on mobile platform. The modifications are as follows:
1st Law: An object at rest will stay at rest; an object in motion will stay in motion at constant velocity, unless acted upon by an unbalanced force. Modification made is that assuming that there is a force of friction (when Force comes to the end), some agents will stop for a while and then continue walking only when other agents around him “force” him not to stop and continue walking otherwise if more than an arbitrary number of agents pass by the other agent, then the agent will have to continue walking else, the agent is supposed to be stationary when the force is finished.
2nd Law: F (Newton) = m(kg) * a (ms-2) where F is the force, m is the mass of the object and a is the acceleration. In this case, each and every agent has their own body mass where some are fat and some are thin. The mass will be used to calculate the BMI and the BMI is used to get the value of acceleration, and finally the F is obtained. Since the force will eventually be force of fiction and the agent will stop for a while, a counter for F depreciating is included. The BMI is standard for the child, adult, old folks and regardless if is a male or female.
3rd Law: For every action, there is an equal and opposite reaction. In a condition of realistic avoidance, if two agents happen to knock each other, they will break away for a while before continue walking again. A ‘NSTimer’ calculates three seconds before the agents are allowed to walk again.
In the implementation phase, the collision detection and avoidance, speed control and maximum turning in 3600 panoramic view are concerned. In the final phase, simulation preferred mean of the crowd characteristics model is discussed, crowd implementation with and without panoramic azimuthal zones are compared and modelling of dynamic crowd in a series of non-equidistant frames from the azimuthal zones is tested.
Implementation
Collision Detection and Avoidance
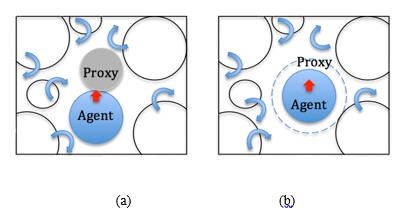
An important part of the system is there are areas of accessibility for walking around based on sub-divided tiles, coordinate and path planning. Collision avoidance allows an agent to be able to detect and avoid another character and the structured environment to reach a simple destination and then to other new sub-goals. Determination of directions is based on Theorem Pythagoras. The key idea of collision avoidance is that there is no two overlapping particle through a proxy agent inspired by [4]. However, the main difference of our proposed work is that the proxy is overlapping with the particle so that the collision avoidance does not form a big gap between two or more particles as illustrated in Figure
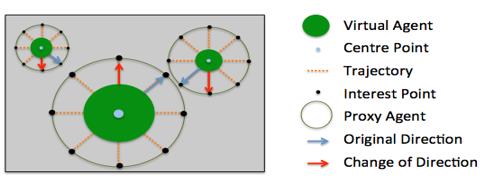
In this case, each virtual agent (AV) has a centre point (CP) whose radius are half the radius of the proxy agent (AP) and the trajectories (TJ) to eight different interest points (IP) as illustrated in Figure
DC = DO + (IP – rand () % 0 +7) * t (1)
Where DC is the Change of Direction, DOis the Original Direction, IP is the Interest Point and t is the delta time.
Thus, the collision avoidance can be more sensitive to the other agents in the neighbourhood area and yielding a result of smoother maneuverer. This can be observed through the comparison of the simulation with or without the aid of the collision avoidance as shown in Figure
Speed Control in 3600 Panoramic View
A hundred particles were initiated from the left and another 100 particles were initiated from the right horizontally. Both of these groups are supposed to travel to the opposite side. When there is no speed control, the virtual agents will move from right to left and vice versa in a constant speed and the particles do not look believable. Later, each of the particles is assigned with different acceleration rate and their speed will slow down and deteriorate to zero where the agents stop before the speed is recovered again. Figure
Maximum Turning
The rotation is implemented in clockwise and the angle of rotation is randomly generated and kept in a database. When the virtual agents detected the end of the edges, it will perform a flexible rotation based on the angle assigned to each agent. The maximum rotation is ±π as depicted in Figure
Workability Tests and Discussions
For performance testing, three experiments are conducted to validate the system. In order to demonstrate the flexibility and usefulness of the proposed approach, crowd motions are created and tested in three different manners. For the first experiment, there were 200 agents where the Identity (ID) are initialized as 001-200 are then randomly assigned with different parameters within the predetermined range and the preferred mean data of each parameter are recorded and applied into all the 200 virtual agents. The result obtained from simulation of 99 rounds is as shown in Table
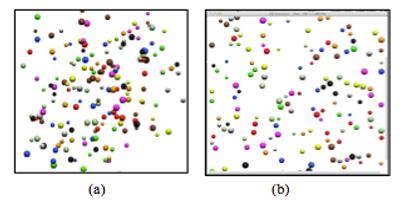
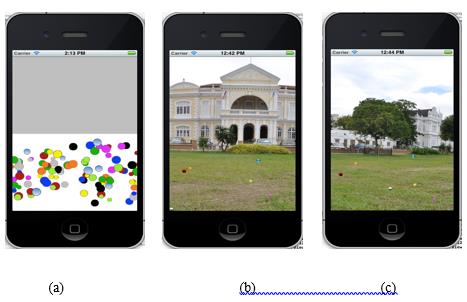
For the second experiment, 200 virtual agents are modelled with particles of different colours in order to validate the proposed dynamic crowd in 360° panoramic view. Based on the visual observation, each particle is able to model their individualised behaviours while avoiding each other without any collisions as shown in Figure
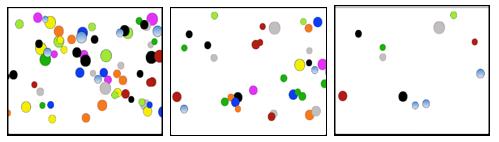
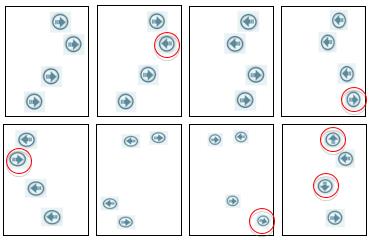
In the third experiment, the circles are then replaced with actual virtual agents and animated using the sprite sheet and accumulation buffer. The crowd behaviour was evaluated by using a set of eight experiments as shown in Figure
Conclusion and Future Work
Based on the experiments, there are two main modifications that are successfully done to the adoption of simulating crowd in mobile platform through visual observations and system validations: (1) The bound radius of the containment force is no longer in an open area but within the 360° panoramic view and thus, the optimum boundary set in this case is a hundred frames of five azimuthal zones each for the horizontal boundary and half of the size of mobile frame for the vertical boundary, (2) As the scrolling of 360° panoramic view distorts the movement of crowd modelling, one solution is to truncate the speed of the particles when the panoramic view is scrolled. Therefore, it is possible to model dynamic crowd in 360° panoramic view especially on mobile platform. One limitation that should be addressed here is that the proportionality of the virtual agent in the dimension of z-axis is not considered within the 360° panoramic view at this point.

Acknowledgements
This work presented is funded by Dana Pembudayaan Penyelidikan (RAGS/1/2015/ICT04/UPSI/02/1) under the research code of 2015-0172-109072.
References
- Bogdanovych, A. & Ijaz, K. & Simoff, S. (2012). The city of uruk: teaching ancient history in a virtual world.Proceedings of the 12th international conference on Intelligent Virtual Agents, IVA’12, Springer-Verlag, Berlin, Heidelberg, 28–35.
- Cherif, F. & Chighoub, R. (2010). Crowd simulation influenced by agent’s socio-psychological state. Journal of Computing 2: 48–54.
- Tasse, F. P. & Glass, K. R. & Bangay, S. (2009) Simulating crowd phenomena in African markets. Afrigraph, 47–52.
- Yeh, H. , Curtis, S., Patil, S., Berg, J., Van Den, Manocha, D. & Lin, M. (2008). Composite agents. Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, SCA ’08, Eurographics Association, 39–47.
- Sakellariou, I. (2012). Agent based modelling and simulation using state machines. SIMULTECH, 270–279.
- Ondrej, J. & Pettré, J. & Olivier,A.-H.& Donikian,S. (2010). A synthetic-vision based steering approach for crowd simulation, ACM Trans. Graph. 29(4), 123:1–123:9.
- Guy,S. J. & Kim, S. & Lin,M. C.& Manocha,D. (2011). Simulating heterogeneous crowd behaviours using personality trait theory. Proceedings of the 2011 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, SCA ’11, 43–52.
- Patil, S. & Berg, J. P. van den& Curtis,S. & Lin,M. C., & Manocha,D. (2011). Directing crowd simulations using navigation fields. IEEE Trans. Vis. Comput Graph.17 (2): 244–254.
- Rodriguez, S. & Denny, J.& Zourntos,T. & Amato, N. M. (2010) Toward simulating realistic pursuit-evasion using a roadmap-based approach.3rd International Conference on Motion in Games, 82–93.
- Takahashi, S. & Yoshida, K. & Kwon, T. & Lee, K. H.& Lee, J. & Shin,S. Y. (2009). Spectral-based group formation control. Compute Graph. Forum, 28(2), 639–648.
Copyright information

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
About this article
Publication Date
22 August 2016
Article Doi
eBook ISBN
978-1-80296-013-6
Publisher
Future Academy
Volume
14
Print ISBN (optional)
-
Edition Number
1st Edition
Pages
1-883
Subjects
Sociology, work, labour, organizational theory, organizational behaviour, social impact, environmental issues
Cite this article as:
Lim, C. K., & Tan, K. L. (2016). An Investigation of Workability Experiment for Crowd in 3600 Panoramic View on Mobile Platform. In B. Mohamad (Ed.), Challenge of Ensuring Research Rigor in Soft Sciences, vol 14. European Proceedings of Social and Behavioural Sciences (pp. 96-103). Future Academy. https://doi.org/10.15405/epsbs.2016.08.15