
Comparative Study of Kinematic Parameters of Circular Punch Applied in Semi-Contact and Full-Contact System


Abstract
Using inertial navigation technology built into MOVEN motion capture equipment, we calculated, based on the position of a kickboxer’s body segments, several kinematic parameters of circular punch features. These are the length of fist trajectory from the beginning of the movement to its contact with the target, the length of fist path measured from the beginning of the elbow extension to the contact with the target, the variation in time of the elbow extension angle, the variation in time of shoulder and hip lines and the difference between them during impact with the target, the average speed on certain segment motions, maximum speed of the fist before impact with the target, acceleration of the fist at the impact with the target. Measurements were made at “Ciprian Sora” Sports Club in Bucharest, on 28 August 2014, and the subject was the national champion of the year in full-contact kickboxing and kickboxing world vice-champion in 2014, in 63kg weight class. After fitting the MOVEN equipment and its calibration was performed, the subject applied ten circular punch strokes in semi-contact system and then ten circular punch strokes in full-contact system. Data acquisition was performed with a frequency of 100 Hz (the acquisition rate of 10 ms). Data were converted using the equipment-related software in .mvnx format, and then were imported into Excel 2010 and processed. The mentioned kinematic parameters were calculated to analyse the strike features and the comparison of each fight system.
Keywords: Kickboxing, circular punch, kinematic parameters, MOVEN
Introduction
A statistic presented in the Handbook of Biomechanics and Human Movement Science (2008) shows
that, out of 8000 articles on martial arts in SportDiscus, only 2 percent are biomechanics-related, so we
can tell the biomechanics of the martial arts is just at the beginning. There are very few quantitative
descriptions explaining how techniques should be conducted and, as it is expected, most part of the
researchers’ studies try to find out how experts’ movements are (Vieten, 2008).
This study is part of the range referring to the biometric analysis of the fist strikes used in combat
sports. In this study, we analyse the circular fist kick applied with the back arm, large hook, swing, or
gyaku mawashi tsuki – all of them being synonyms in naming the same technique. We will make
reference to the strikes applied in semi-contact system (with controlled contact) and in full contact.
The purpose of this study is to obtain objective and accurate information regarding this technique
and to point out some aspects regarding the distance, trajectory, fist’s velocity and execution velocity.
The circular punch is aimed to touch the target (a part of the body that points in competitions or in a
box bag, in our experiment) on a curved trajectory. The fist has a longer trajectory, but its speed at the
moment of reaching the target is bigger compared with the direct punch. The impact power is higher,
surprising the opponent and reducing his/her abilities to organize one’s defence (blocking, parade or
shirk). As we mentioned in previous studies (Băițel & Deliu, 2013a;Băițel & Deliu, 2013b; Băițel,
Deliu, & Cordun, 2015), even if the majority of fist strike techniques are apparently simple, in every of
these techniques, there can be precisely defined moving sequences with their space and time limits.
For a better understanding of the facts, we have to make some references to the concepts used:
trajectory, distance, shoulder line, hip line. Every acquisition in segment coordinates represents the
distances, on the three axes, towards the orthogonal system, defined by the system in the moment of
calibration of the equipment. Totalizing the recorded values (calculated in space) between two
temporal landmarks provides the length of the trajectory that segment goes through the space. The
difference of the two values (initial and final ones) provides the distance between initial and final
position of the segment, which, in the circular punch situation, is shorter than the fist’s trajectory
between the two limits.
The shoulder line represents the angle between the shoulder line and the Ox axis, and the hip line
represents the angle between the hip line and the same Ox axis. These two angles are calculated in a
horizontal plane, using the Ox and Oy coordinates of the segments. Through these cinematic
parameters, we get information about the succession of upper and lower body involvement in a certain
movement and about those segments stiffening at the impact moment with the target. This is a very
important aspect in full-contact strikes; the impact power depends of the involved muscular mass. The
way the body segments are kinetically coupled influences the increasing or decreasing of the involved
muscular mass.
Materials and methods
Taking into account the action velocity required by real-fighting conditions (competition), with an
unpredictable opponent, this time the delimitation of movement sequences is possible only if we have
very precise measuring instruments. That is the reason why we used the MOVEN from Xsense
acquisition system. The sensors of this equipment cover the inertial navigation technology.
The equipment was attached, using a strip system, to the research subject, a kickboxer of
international level – second in World Championship full-contact boxing, 63 kg, in 2014. The subject
applied 10 swing semi-contact strikes and 10 full-contact ones in a suspended 30-kg boxing bag. The
test was done in August 2014, in the training hall of “Ciprian Sora” Sports Club.
The 17 kinetic sensors of the equipment were attached to the whole body of the athlete: feet, lower
legs, upper legs, hands, forearms, arms, shoulders, sternum, pelvis and head. The Xbus masters
synchronize the 17 sensors’ acquisitions and send wireless information on the position, in relationship
with the orthogonal axes, to the MVN Studio software on a laptop. The .mvn files are transferred to
.mvnx format and then to Excel 2010. From the multitude of information concerning the 23 body
segments, we chose those related to fist, elbow and right shoulder (the side that makes the kick) and
those concerning the hips and shoulders (both, left and right). The MVN system is a full-body inertial
system for measuring the cinematic, having video data in phase. Using the pre-recorded anthropometric
parameters, the MVN software creates a subject’s avatar that can be 3D visualized any time after
recording, with different speeds – even frame by frame. The acquisition rate is 100Hz.
In this research, we used: observation method, bibliographical study method, experimental method,
mathematical method, graphical method and case study method.
Results
The methodology in the biomechanical analysis of the circular strike, with the inertial navigation
technology, is almost similar with what we have presented in previous works concerning the straight
fist strikes:
§The import of the position acquisitions concerning the interested segments: fist, elbow and right
shoulder, and hips and shoulders, all of them with reference to the orthogonal coordinate axes;
§The calculation, based on purchased data, of the hip space position and, following its position, the
time variation on the whole movement length. It uses the Pythagorean space theorem – formula (1):
(1)
Where:
§Intersegmental angle calculation – elbow extension (2), the angle between humerus and the vertical
(6) and their time variation:
Where:
a = forearm length
b = arm length
i = distance between shoulder and fist
(3)
(4)
(5)
Where:
px, py, pz = fist coordinates on ox, oy, oz axes
cx, cy, cz = elbow coordinates on ox, oy, oz axes
ux, uy, uz = shoulder-fist distance
(6)
Where:
β= angle between humerus and horizontal
ux, uy, uz = shoulder coordinates on x, y, z axes cx, cy, cz = elbow coordinates on x, y, z axes
§Calculation of the shoulder line, hip line and their time variation:
Sl = atan2(sdrx – sstx , sdry – ssty) [°] (7)
Where:
Sl = shoulder line sdrx,sdry = right shoulder position coordinates on Ox, respectively Oy axes sstx,ssty = left shoulder position coordinates on Ox, respectively Oy axes
And:
Hl = atan2(hdrx – hstx, hdry – hsty) [°] (8)
Where:
Hl= hip line hdrx,hdry = right hip coordinates on Ox, respectively Oy axes hstx,hsty = left hip coordinates on Ox, respectively Oy axes
§Fist acceleration during time:
acc = (v2 – v1) /0,010 [m/s2] (9)
§Distance between the beginning of the attack and the point where the fist reaches the target:
d = 𝑥! − 𝑥!! + 𝑦! − 𝑦!! + 𝑧! − 𝑧!! [m] (10)
§Putting the results into Rota
§Identification of the move sequences for each strike:
oThe reinforcement (the slow part of the move) – z decreases oThe attack (the speed part of the strike) oThe impact (the sudden decrease in speed) oThe fist’s withdrawal §Setting the temporal sequences
§Estimation of the fist trajectory length during the established movements
§Estimation of the average speed of the fist during the move sequence delimited by the beginning of
elbow extension and the impact with the target (the moment is recording a minimum fist’s
acceleration);
§Estimation of the average speed of the fist at the contact with the target;
§Estimation of the maximum speed of the fist before the contact with the target;
§Comparing the cinematic parameters for semi-contact and full-contact strikes.
In Table 1, we present the main cinematic parameters calculated for semi-contact strikes, where:
T1 – space for preparing the strike (armouring) [ms];
T2 – space of fist attack (the beginning of high speed drive of the fist through the impact with the target)[ms];
T3 – space from the impact through the beginning of the fist’s withdrawal [ms]; L1, L2, L3 – fist’s trajectory length during T1, T2, T3; L – fist’s trajectory length during T1+ T2; v1-2 – fist’s velocity during T1 [m/s]; v2 – fist’s velocity during T2 (the attack) [m/s]; acc – fist’s acceleration on impact [m/s²]; vmax – fist’s maximum velocity (before the impact) [m/s]; α – elbow extension angle at the impact and at the beginning of the fist’s withdrawal [°];
β – angle between arm and the vertical axis on the impact moment and at the beginning of the fist
withdrawal [°];
Hl – Sl – difference between the hip and shoulder lines at the impact and at the beginning of the
fist withdrawal [°];
d – distance between the point considered the beginning of the attack phase and the point where
the impact occurs [m];
d’xoy – length of the projection into xOy plane for the d segment [m].
In Table 2, we present the same cinematic parameters calculated for full-contact strikes.
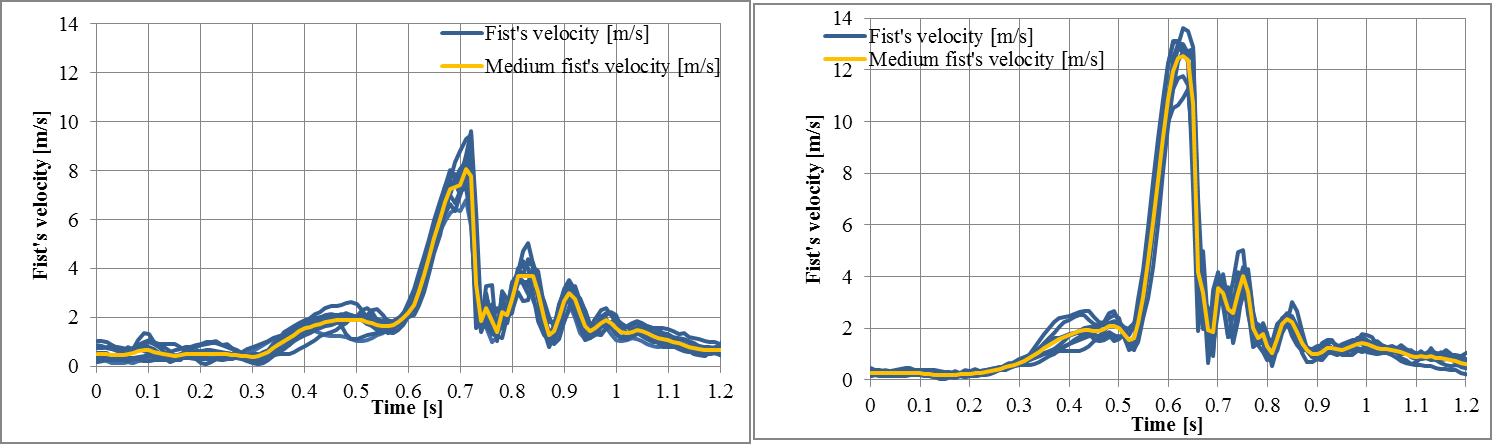
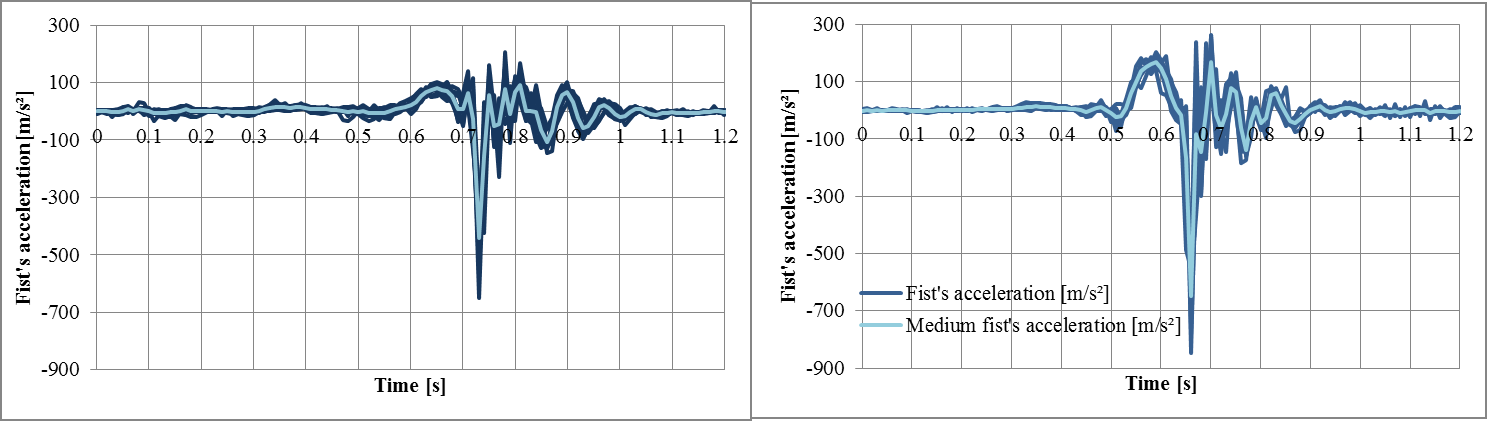
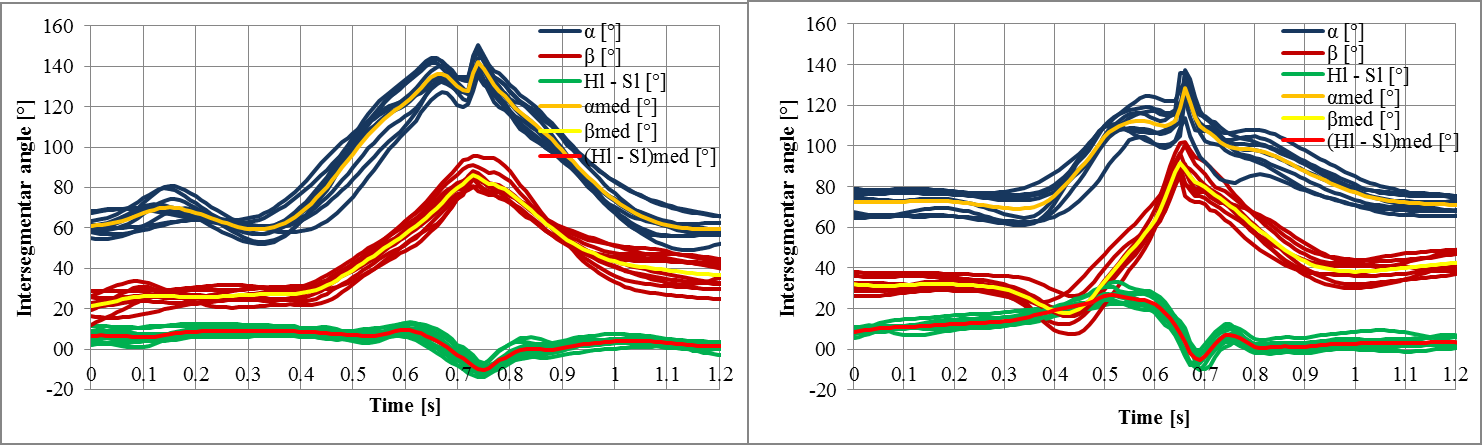
Figures 1, 2 and 3 show the variations in time for the fist’s velocity, fist’s acceleration and
intersegmental angles (elbow extension, angle between arm and the frontal plane, difference between
hip line and shoulder line). Graphs are presented comparatively for semi- and full contact for a better
observance and differentiation.
Discussions and conclusions
We can see a lot of similitudes between the semi-contact and full-contact kicks:
§The reinforcement is a slow moment for both moves;
§The length of the attack phase is similar for both styles;
§The preferred striking level was the same;
§The difference between hip and shoulder lines was smaller than 15° for all strikes, no matter the
style.
However, we can underline a lot of important differences, too:
§The speed of the attack is higher in full-contact;
§The fist’s acceleration is bigger on the attack phase and smaller to the impact for the full-contact
kicks;
§The elbow extension is shorter for the full-contact kicks;
§The difference to the impact between hip and shoulder lines is a negative one for all semi-contact
kicks. The shoulder’s twisting is more accentuated than the hip’s for a better control at the impact
moment;
§The positive values show a good kinetic connection between the upper and lower body for touching
the purpose: a maximum impact.
Regarding the results, some specifications should be made concerning the fist’s velocity in the
strike. As we have shown, the movement sequences composing the specific technique are developed
over a time and with different speeds. This allows different interpretations when we speak about the
strike’s velocity, or the execution velocity, mainly a circular one. On the other hand, we consider the
fist’s speed as being the ratio between the length of the trajectory and the time that the fist needs to do
this. Secondly, and more pragmatically, we make reference to the necessary time to get from point A to
point B (Deliu, 2008a), no matter the trajectory. In this manner, we refer to the execution velocity. Not
least, referring to the fighting distance (Deliu, 2008b), we must take account the projection into the
horizontal of the distance –d’xOy parameter.
References
Băițel, I., & Deliu, D. (2013a). Kinematic analysis of the cross punch applied in full-contact system using inertial navigation technology and surface electromyography. Procedia - Social and Behavioral Sciences, 117, 335-340. (3rd International Congress of Physical Education, Sports and Kinetotherapy, ICPESK 2013).
Băițel, I., & Deliu, D. (2013b). Kinematic aspects of direct punch cross and jab applied in semi-contact. The 9th International Scientific Conference eLearning and Software for Education, Bucharest, April 25-26, 2013, 97-101.
Băițel, I., Deliu, D., & Cordun, M. (2015). Efficiency evaluation method for punch strikes in combat sports based on cinematic parameters. The 11th International Scientific Conference eLearning and Software for Education, Bucharest, April 25-26, 2015.
Deliu, D. (2008a). Antrenamentul sportiv în disciplinele de combat. București: Bren.
Deliu, D. (2008b). Metodica disciplinelor sportive de combat. București: Bren.
Vieten, M. M. (2008). Application of Biomechanics in Martial Art Training. In Y. Hong & R. Barlett (Eds.), Handbook of Biomechanics and Human Movement Science (pp. 554-562), Routledge.
Copyright information

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
About this article
Publication Date
10 June 2016
Article Doi
eBook ISBN
978-1-80296-010-5
Publisher
Future Academy
Volume
11
Print ISBN (optional)
-
Edition Number
1st Edition
Pages
1-509
Subjects
Sports, sport science, physical education
Cite this article as:
Baitel, I., Deliu, D., Cordun, M., & Angelescu, L. (2016). Comparative Study of Kinematic Parameters of Circular Punch Applied in Semi-Contact and Full-Contact System . In V. Grigore, M. Stanescu, & M. Paunescu (Eds.), Physical Education, Sport and Kinetotherapy - ICPESK 2015, vol 11. European Proceedings of Social and Behavioural Sciences (pp. 447-454). Future Academy. https://doi.org/10.15405/epsbs.2016.06.62