
Adaptive Computing Technologies for Diagnostics and Control of UAVs With Fault-Tolerant On-Board Software


Abstract
The article deals with the issue of studying the principles and developing approaches to improving the fault tolerance of UAVs onboard software. The questions of analysis and study of the resource intensity of control and diagnostic algorithms, and the technology of balancing computational tasks using the methodology of distributed computing are formed. The use of hybrid modeling methods is appropriate in solving the problem, since in the work under the control of the UAV we will understand the purposeful impact on the functional processes that describe the implementation of the flight plan, route, selection and the mission as a whole. In this case, the established resource and time constraints must be taken into account. The scientific problem that the project is intended to solve is the creation of new adaptive distributed technologies for diagnosing and managing fault-tolerant on-board software for UAVs based on hybrid modeling methods. In the article, a methodology for modifying the algorithms for monitoring and diagnosing on-board software is formed, which is consistent with the multi-criteria characteristic of possible typical scenarios of UAV behavior.
Keywords: Adaptive computing technology, onboard software, UAV, fault-tolerant software, hybrid modeling method, distributed computing, algorithm, monitoring
Introduction
Unmanned aerial vehicles (UAV) have a wide range of applications, since today there are many areas of research (Arctic, shelf, remote sensing, precision farming and agricultural machinery navigation, seismic research and volcanology, near and deep space), as well as industries where the issue of managing a functional object without the presence of a person is relevant, in particular, control without a stable communication channel, control in full autonomous state (Juniper, 2015; Masutti & Tomasello, 2018).
Under the control of an UAV, we will understand the purposeful impact on the functional processes that describe the implementation of the flight plan, route, sampling and mission performance as a whole, within the established resource and time limits.
The mission of such functional objects sometimes consists not only in obtaining digital data that can be accumulated or transmitted over a communication channel, but also in the physical delivery of samples of soil, air, water, and other artifacts.
Thus, in addition to the basic control elements of UAV, provided by standard subsystems (power supply, stabilization, telemetry, etc.), control of peripheral and specific equipment is provided, associated, for example, with express analysis of air composition for methane content during geological exploration missions, with the operation of machine vision or spatial thermometry subsystems, musculoskeletal manipulation devices and capture systems during sampling, etc.
Problem Statement
The key to successful management of an object is the stability of its control system, as well as the ability to maintain control in the event of software and hardware failures of various subsystems (Kovalev et al., 2019; Rabbath & Léchevin, 2010; Sadeghzadeh, 2015).
The autonomy of the object is characterized by its full-featured capabilities, including self- diagnostics, i.e. the concept of autonomy is fully relevant to its functionality and such objects are able to function in full autonomous state, while providing resources for both the mission and diagnostics for the correct operation of the on-board software. Another "polar" example is UAV with limited autonomy, characterized by a full ability to perform a mission, while being limited in self-diagnostic tasks due to the lack of free processor time or power supply for using resource-intensive testing algorithms. In this case, a decision arises to perform diagnostics of UAV on third-party computing resources, provided that a stable data transmission channel is available.
Depending on the composition of the onboard software and various boundary conditions for the operation of UAV, it becomes necessary to balance the functionality of the onboard software on distributed computing powers.
The scientific problem that the project is intended to solve is the creation of new adaptive distributed technologies for diagnosing and managing fault-tolerant on-board software for UAVs.
Research Questions
The key solution to this problem is the formation of model-algorithmic support aimed at improving the fault tolerance of onboard software by providing distributed computing technologies for resource-intensive tasks and processes of UAV. Despite the fact that the fault tolerance of onboard software has been studied for a long time, relevant sections of knowledge have been developed, and many effective approaches have been proposed, such as multiversion software, the use of watchdog timers, self-diagnostic systems, and others, it should be noted that perfect solutions that allow creating absolutely reliable UAV do not exist.
The manifestation of failures is still possible due to both hardware failures and algorithmic or software errors. Therefore, the further development of research in this area is still a significant scientific task, especially given the active growth of UAV of various types (Jha, 2016; Wang, 2018).
It should also be noted that not only reliability is important in terms of the appearance of the correct program output of subsystems, but also the time of the appearance of this output, that is, the delay or speed of the system response. A correct decision to change the speed or trajectory of the vehicle, but made with a delay greater than necessary, can lead to no less dangerous consequences than a failure of the control system.
Thus, we can conclude that the need for fault-tolerant real-time control systems arises not only in highly specialized areas, such as manufacturing, but also in everyday situations that we encounter almost every day.
Purpose of the Study
The purpose of the study is to develop new principles and approaches to improve the fault tolerance of onboard software, taking into account the analysis of the resource intensity of control and diagnostic algorithms, the technology for balancing computational tasks based on the methodology of distributed computing.
Research Methods
Methods and approaches for solving scientific problems are the methods and approaches of information theory, software fault tolerance, service-oriented architecture (SOA) methodology, artificial intelligence theory, computing modelling.
Findings
To date, the study of the problem of improving the quality of the on-board diagnostics systems is associated with the design of new and the development of existing communication protocols, as well as methods of local diagnostics, without revising the conceptual approaches in the on-board software architecture and introducing distributed computing (Karamchedu, 2020; Kim et al., 2017; Kovalev et al., 2021; Papageorgiou, 2019; Peibei et al., 2017; Su et al., 2017; Zhou et al., 2017).
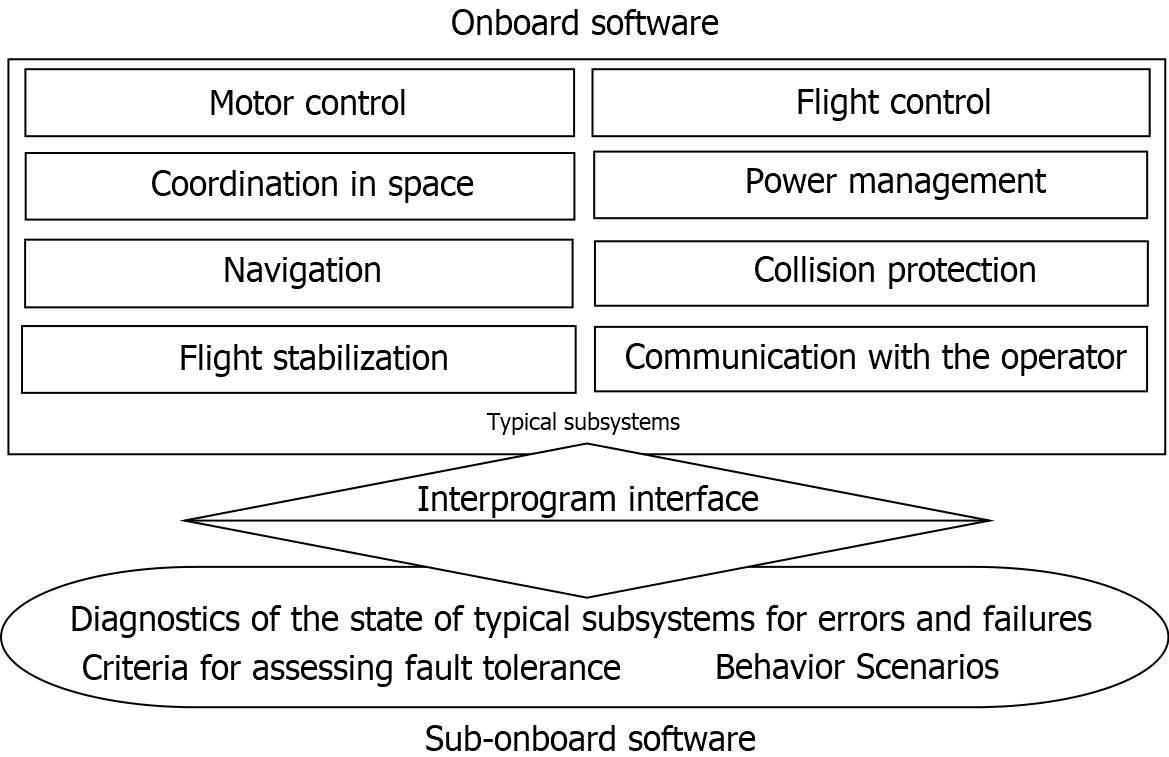
The first thing to do is to form an architecture of the onboard software for UAV will be presented with the receipt of model-algorithmic solutions for sub-onboard software that implement diagnostics of the behavior of UAV in various operating modes under various boundary conditions «figure 1».
Works and results of works for which the project is directed:
- Analysis of the subject area - the architectural features of the onboard software of UAV and the implementation of control and diagnostic subsystems in them. Result: model specification of software solutions for subsystems for monitoring and diagnosing on-board software for UAV.
- Studying the principles and approaches to improve the fault tolerance of the onboard software of UAV in various operating modes under various boundary conditions. Result: descriptive models of scenarios for the behavior of UAV, characterizing the criteria for assessing the fault tolerance of UAV, in fact, and providing typical subsystems of onboard software.
- Research of approaches to the methodology of service-oriented architecture in the problem of diagnosing the state of onboard software for errors and failures. Result: model interpretation of the sub-on-board software of the tasks of diagnosing the state of on-board software for errors and failures as a software layer with an inter-program interface and an explicit service function.
- The study of models and algorithms for monitoring and diagnosing on-board software in order to assess the possibility of inclusion in the sub-on-board software being formed. Result: generated pool of original and modified software algorithms for monitoring and diagnosing on-board software, comparable scenarios for the behavior of UAV in various boundary conditions of model operation.
The second thing to do is to implement the proposed model-algorithmic solutions of the sub-board software that implement the functionality of the control and diagnostics subsystem as configurable digital electronic circuits. This will allow us to estimate the resource intensity of monitoring and diagnostic algorithms, as well as to provide methods for balancing computational tasks on third-party resources.
Works and results of works for which the project is directed:
- Development of a subsystem for monitoring and diagnosing on-board software on programmable logic integrated circuits of embedded control systems for UAV. Result: model prototype of sub-onboard software interpreting the functionality of the subsystem for monitoring and diagnosing the main process changes directly on-board software implemented as configurable digital electronic circuits.
- Investigation of the functionality of the model prototype of the sub-board software – the control and diagnostics subsystem in the emulation mode on test input data sets. Result: method for estimating the resource intensity of algorithms for monitoring and diagnosing on-board software in order to determine the necessity and possibility of delegating computing tasks to third-party computing resources.
- Description of the procedures for the formation and displacement of computing tasks on third-party computing resources. The result will be a formalized method for balancing computational tasks for third-party decision making.
Methods and approaches for solving scientific problems: software fault tolerance (Kovalev et al., 2017), digital electronic circuit design methodology (Testoedov et al., 2018), and probability theory will be applied.
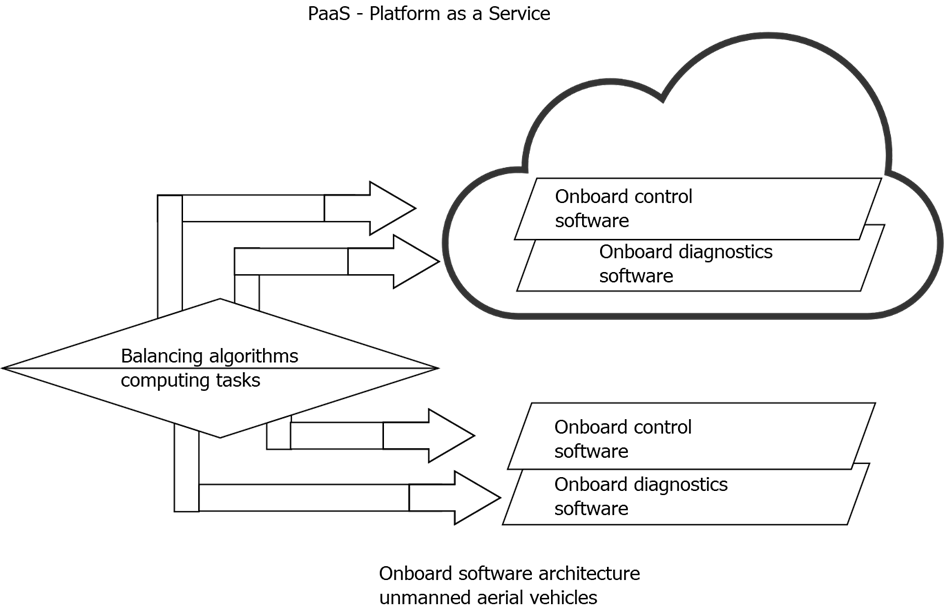
The second thing to do is to develop adaptive distributed technologies for diagnosing and managing fault-tolerant on-board software for UAV «Figure 2».
Works and results of works for which the project is directed:
- Development of the principles of distributed computing execution and multi-stage delegation of managerial decision making. Result: software model of cloud distributed computing (PaaS - Platform as a Service) that provides balancing of computing tasks and correct decision making.
- Development of principles of machine-to-machine interaction for remote transmission of diagnostic information and control. Result: software machine-to-machine cloud interface to provide service communication of UAV.
- Development of a simulation environment for the possibility of checking the correctness of the proposed approaches and developed algorithms. Result: simulation environment for the execution of machine-to-machine interaction algorithms.
Methods and approaches for solving scientific problems: distributed computing methods, clouds computing, machine learning methods and other.
Conclusion
At the initial stage of the project, it will be necessary:
- Analysis of the subject area - the architectural features of the onboard software of UAV and the implementation of control and diagnostic subsystems in them.
- Studying the principles and approaches to improve the fault tolerance of the onboard software of UAV in various operating modes under various boundary conditions.
- Research of approaches to the methodology of service-oriented architecture in the problem of diagnosing the state of onboard software for errors and failures.
- The study of models and algorithms for monitoring and diagnosing on-board software in order to assess the possibility of inclusion in the sub-on-board software being formed.
The article substantiates a promising approach to the formation of adaptive computing technologies for diagnosing and managing fault-tolerant on-board software in order to achieve a number of scientific results:
- Model specification of software solutions for subsystems for monitoring and diagnosing on-board software for UAV. This result will theoretically substantiate new approaches to the presentation of procedures for monitoring and diagnosing the processes of on-board software, as well as form their classes with the selection of attributes and a sign of functional work.
- Descriptive models of scenarios for the behavior of UAV, characterizing the criteria for assessing the fault tolerance of UAV and providing typical subsystems of onboard software. This result will allow us to obtain a multicriteria characteristic of possible typical scenarios for the behavior of UAV, as well as to build functional dependencies of the resource requirement potential of onboard software.
- Model interpretation of the sub-on-board software of the tasks of diagnosing the state of the on-board software for errors and failures as a software layer with an inter-program interface and an explicit service function. This result will become an element of the model software architecture of onboard software, based on the approaches of the service-oriented architecture methodology.
The generated pool of original and modified software algorithms for monitoring and diagnosing on-board software, comparable scenarios for the behavior of UAV in various boundary conditions of model operation. This result will allow us to form a methodology for modifying the algorithms for monitoring and diagnosing on-board software, consistent with the multi-criteria characteristic of possible typical scenarios for the behavior of UAV.
References
Jha, A. R. (2016). Theory, Design, and Applications of Unmanned Aerial Vehicles. CRC Press.
Juniper, A. (2015). The Complete Guide to Drones. Octopus Publishing Group.
Karamchedu, V. P. (2020). A Path from Device-to-Device to UAV-to-UAV Communications. IEEE 92nd Vehicular Technology Conference - VTC2020-Fall), 1-5.
Kim, J., Neogi, N., Danilov, C., & Ortiz, A. (2017). UAV Systems and Networks: Emulation and Field Demonstration. In K. Namuduri, S. Chaumette, J. Kim, & J. Sterbenz (Eds.), UAV Networks and Communications (pp. 96-119). Cambridge University Press.
Kovalev, I., Losev, V., Saramud, M., & Petrosyan, M. (2017). Model implementation of the simulation environment of voting algorithms, as a dynamic system for increasing the reliability of the control complex of autonomous unmanned objects. MATEC Web of Conferences, 132, 04011.
Kovalev, I., Losev, V., Saramud, M., Kalinin, A., & Lifar, A. (2021). To the question for formation of a block-modular structure of the control system for unmanned aerial vehicles. Modern Innovations, Systems and Technologies, 1(3), 48-64.
Kovalev, I. V., Losev, V. V., Saramud, M. V., Kovalev, D. I., & Chuvashova, M. N. (2019). Visual presentation of life cycle control model of the cross-platform onboard software. IOP Conference Series: Materials Science and Engineering, 537(3), 032104.
Masutti, A., & Tomasello, F. (2018). International Regulation of Non-military Drones. Edward Elgar Publishing Limited.
Papageorgiou, A. (2019). Design Optimization of Unmanned Aerial Vehicles.A System of Systems Approach. Linköping University.
Peibei, M., Ming, L., & Jun, J. (2017). Control of multi-UAV cooperative formation with equality communication time-delay. Hangkong Xuebao/Acta Aeronautica et Astronautica Sinica, 38(S1), 721551-721551.
Rabbath, C. A., & Léchevin, N. (2010). Safety and reliability in cooperating unmanned aerial systems. World Scientific. https://doi.org/10.1142/7108
Sadeghzadeh, I. (2015). Fault tolerant flight control of unmanned aerial vehicles [Doctoral dissertation]. Concordia University. https://core.ac.uk/download/pdf/211518117.pdf
Su, W., Zhao, X., Zhang, M., & Wang, W. (2017). Extracting Flying Obstacles Using Airborne LiDAR Point Cloud Data. Nongye Jixie Xuebao/Transactions of the Chinese Society of Agricultural Machinery, 48(1), 79-97.
Testoedov, N. A., Kovalev, I. V., Fošner, M., Voroshilova, A. A., & Losev, V. V. (2018). Analysis of logic-time characteristics of subsystem supply functioning hardware elements of unmanned aerial vehicles. IOP Conference Series: Materials Science and Engineering, 450, 022002.
Wang, B. (2018). Fault Diagnosis and Fault-tolerant Control of Unmanned Aerial Vehicles. Concordia University. https://spectrum.library.concordia.ca/id/eprint/984205/
Zhou, S. L., Qi, Y. H., Zhang, L., Yan, S., & Kang, Y. H. (2017). Time-varying formation control of UAV swarm systems with switching topologies. Acta Aeronautica et Astronautica Sinica, 38(4), 264-272. https://doi.org/10.7527/S1000-6893.2016.0219
Copyright information

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License
About this article
Publication Date
27 February 2023
Article Doi
eBook ISBN
978-1-80296-960-3
Publisher
European Publisher
Volume
1
Print ISBN (optional)
-
Edition Number
1st Edition
Pages
1-403
Subjects
Hybrid methods, modeling and optimization, complex systems, mathematical models, data mining, computational intelligence
Cite this article as:
Kovalev, I. V., Losev, V. V., Kovalev, D. I., Astanakulov, K. D., Voroshilova, A. A., Podoplelova, V. A., & Borovinsky, D. V. (2023). Adaptive Computing Technologies for Diagnostics and Control of UAVs With Fault-Tolerant On-Board Software. In P. Stanimorovic, A. A. Stupina, E. Semenkin, & I. V. Kovalev (Eds.), Hybrid Methods of Modeling and Optimization in Complex Systems, vol 1. European Proceedings of Computers and Technology (pp. 387-393). European Publisher. https://doi.org/10.15405/epct.23021.48