
A Neutrosophic Adaptive Recurrent Neural Network for Time-Varying Matrix Inversion


Abstract
Recently, extensive research has been carried out on the convergence and robustness of a unique class of recurrent neural networks known as zeroing neural networks (ZNN). ZNN dynamics has proven to be highly effective at tackling a wide range of time-varying problems in science and engineering. The use of fuzzy logic systems (FLS) in improving ZNN dynamic systems has been shown to be effective in recent research. neutrosophic logic system (NLS) is known to be a more general and efficient approach than FLS. An improvement of the ZNN design for tackling time-varying matrix inversion problems is proposed in this paper by using an appropriately defined NLS. Particularly, a suitable value obtained as the output of an appropriately designed NLS can be used to dynamically adjust the gain parameter contained in ZNN architecture over time to speed up the convergence of the ZNN model. Numerical experiments show that the NLS-based ZNN model is more effective than the equivalent traditional ZNN model in defining the varying-gain parameter.
Keywords: Zeroing neural networks, neutrosophic logic, matrix inverse, dynamical system
Introduction
Artificial neural networks are frequently utilized in science and engineering fields to solve time-varying matrix inversion (TV-MI) problems, including optimization and robot control (Zhong et al., 2021), signal-processing and statistics (Cichocki & Unbehauen, 1993). The dynamic system approach is an essential and efficient parallel processing technique for handling matrix-inversion problems. A number of dynamic and analog solvers relying on recurrent neural networks (RNN) have been developed and investigated as a result of extensive studies in neural networks (Cichocki & Unbehauen, 1993). Due to its parallel distributed nature and simplicity of circuit design, the RNN approach is increasingly viewed as a powerful alternative for online computing (Zhang & Ge, 2005).
As a special kind of RNN, created by Zhang in (Zhang & Ge, 2005), the zeroing neural network (ZNN) is considered as a state-of-the-art online computation method. Mainly, as a tool for zeroing equations, ZNN has been thoroughly investigated and used to generate online solutions for time-varying problems in a wide domain of time-varying problems, including problems of matrix equations systems (Jin et al., 2017), quadratic optimization (Zhong et al., 2021), linear equations systems (Stanimirović et al., 2022), and generalized inversion (Katsikis et al., 2022). Declaring an error matrix equation (ERME) is the initial step for the underlying problem in the ZNN dynamics creation. The subsequent step benefits from the dynamical evolution (Zhang & Ge, 2005)
(1)
where signifies the time derivative, is a varying-gain parameter employed to scale the convergence, while signify element-wise use of an increasing and odd activation function (AF) on .
The creation of fuzzy adaptive ZNN models is the current trend in the development of ZNN. Considering that fuzzy logic systems (FLS), which are based on linguistic and fuzzy rules (Zadeh, 1965), can deal with uncertainty, ambiguity, vagueness, and imprecision, recent studies have concentrated on improving the ZNN design by incorporating fuzzy control (Katsikis et al., 2022). However, the development of the intuitionistic fuzzy set theory has led to the introduction of the neutrosophic set theory, which adds the indeterminacy-membership function to the FLS and improves it into a neutrosophic logic system (NLS) (Smarandache, 2003). To enhance the ZNN approach through FLS, the ZNN dynamical evolution (1) is transformed into the fuzzy adaptive ZNN (FZNN) dynamical evolution as follows (Katsikis et al., 2022):
(2)
where is the desired fuzzy parameter.
The TV-MI problem is approached in this study using appropriately defined neutrosophic adaptive ZNN (NSZNN) dynamical evolution design of the form (2) where is obtained through a neutrosophic logic controller (NSLC). The linear AF, defined by , is considered and the parameter is the desired neutrosophic parameter.
The primary points of this study are as follows:
- A novel neutrosophic adaptive ZNN model (NSZNN) for addressing the TV-MI problem is presented using an appropriate parameter ν in (2) defined as the output of an NSLC.
- Two numerical experiments show that the NSZNN model is more effective than the equivalent traditional ZNN model at defining the varying-gain parameter.
Problem Statement
In this study, the following TV-MI is addressed using the ZNN approach:
(3)
where denotes the time and signify the identity matrix, the time-varying non-singular input matrix, and the inverse of , respectively. Notice that is the desired solution to the TV-MI problem (3).
Research Questions
In this section, we will consider the following research questions relative to the TV-MI problem:
- Can neutrosophic control be incorporated into the ZNN design?
Such incorporation is possible after building an NSLC with a particular structure.
- Is the NSZNN model more effective than the corresponding traditional ZNN model at defining the varying-gain parameter?
The findings of simulation experiments show that the NSZNN has a faster convergence speed than the equivalent traditional ZNN model. In other words, the NSZNN performs better than the equivalent traditional ZNN model in solving the TV-MI problem.
Purpose of the Study
Following the current trend in the development of ZNN, a neutrosophic adaptive ZNN model, called NSZNN, for addressing the TV-MI problem is introduced in this paper. As a result, the study aims to enhance the performance of the ZNN design by creating and incorporating an NSLC. Our intention is to apply the dynamical flow of the form (2) and an appropriate neutrosophic parameter in solving (3).
Research Methods
This section introduces the NSLC that can enhance the ZNN design's performance and describes the ZNN and NSZNN models for solving the TV-MI problem (3).
The Neutrosophic logic controller
The entries of a neutrosophic set are neutrosophic numbers of the next form (Smarandache, 2003):
(4)
where , and , respectively, denote the truth, the indeterminacy, and the falsity membership functions whose values are independent and within . In the NSZNN design, the varying-gain parameter values will be viewed as predictions according to the , and values. Since the main objective in the ZNN design is , it makes sense to employ as a metric for developing NSLC in the NSZNN design. Note that signifies the matrix Frobenius norm.
In our approach, the NSLC's development is divided into three stages. These stages are the neutrosophication process, the neutrosophic inference engine, and the de-neutrosophication process.
In the neutrosophication process, the input set is transformed into the fuzzy input set and the output set is transformed into the fuzzy output set , which is in the neutrosophic format, through the neutrosophication process. It is important to note that the truth, indeterminacy, and falsity membership functions are defined as sigmoid, Z-shaped, and Gaussian functions. Particularly, we consider the following sigmoid truth-membership function:
(5)
where the parameters and , respectively, are responsible for its slope at the crossover point , Further, we consider the next Z-shaped falsity-membership function:
(6)
where the parameters and , respectively, signify the shoulder and the foot of the function. Lastly, we consider the next Gaussian indeterminacy-membership function:
(7)
where the parameters and , respectively, signify the standard deviation and the mean.
In the neutrosophic inference engine, the next "IF-THEN" rule is considered as the neutrosophic rule between and :
where is a fuzzy set, and exactly indicates a significant error.
In the neutrosophication process, the conversion results to a single (crisp) value . Particularly, the following de-neutrosophication rule is proposed to obtain the parameter :
(8)
where , and and are parameters for setting the lower and upper limit of (8), respectively.
Solving the TV-MI problem through the ZNN and NSZNN designs
Considering the TV-MI problem (3), the next ERME is declared in accordance with the initial step of the ZNN design:
(9)
which has the following first time derivative:
(10)
In accordance with the next step of the ZNN design, (9) and (10) are expanded in (1) as below:
(11)
or in a equivalent form
(12)
Then, applying the Kronecker product and vectorization , the following ZNN model under the linear AF is obtained:
(13)
Therefore, (13) is the recommended ZNN model for solving the TV-MI problem.
By using the same procedure as for the ZNN model (13), the following NSZNN model under the linear AF is obtained:
(14)
As a result, (14) is the recommended NSZNN model for solving the TV-MI problem. It is worth mentioning that (13) and (14) may successfully be solved by utilizing an ode MATLAB solver. Additionally, the ZNN model (13) converges to the theoretical solution according to (Zhang & Ge, 2005), whereas the NSZNN model (14) converges to the theoretical solution according to (Dai et al., 2022).
Findings
In this section, the NSZNN model is compared against the equivalent traditional ZNN model in two numerical experiments. For all experiments, the varying-gain parameter has been set to , the ode15s MATLAB solver has been employed with the time interval , and the initial state has been set to in both models. Additionally, the parameters of the NSLC have been set to and .
Experiment 1
The experiment deals with the next input matrix:
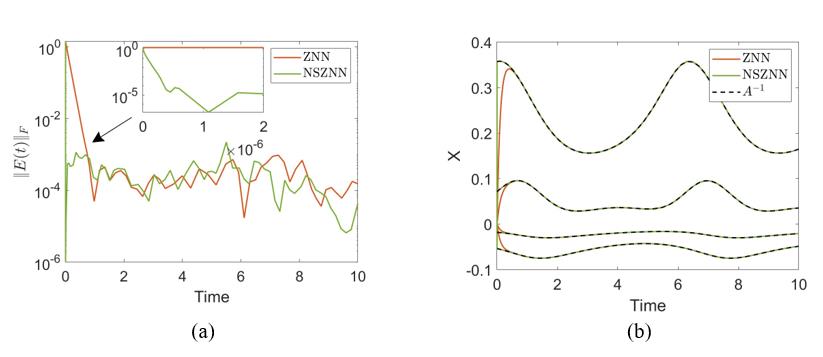
The outcomes of the ZNN and NSZNN dynamics for tackling the TV-MI problem are presented in Figure 1.
Experiment 2
This experiment deals with the following input matrix:
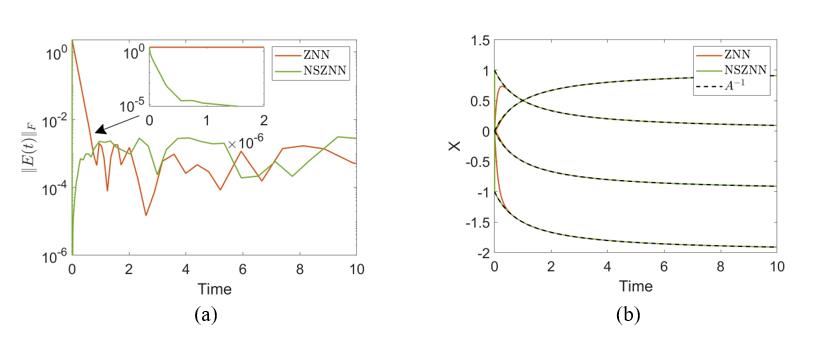
The outcomes of the ZNN and NSZNN dynamical flows for tackling the TV-MI problem are presented in Figure 2.
Conclusion
The findings of numerical experiments 1 and 2 are presented in Figures 1 and 2, respectively. The ERME convergence is presented in the (a) sub-figures of Figures 1 and 2. These figures demonstrate that for both models, the ERME convergence starts at in a value above , although it ends at different times for each model in the interval . Particularly, the ERME convergence of the traditional ZNN model ends close to , while the ERME convergence of the NSZNN model ends close to . The solutions trajectories of the experiments are presented in the (b) sub-figures of Figs. 1 and 2. These figures demonstrate that the models’solutions trajectories behave in the same way with the ERME convergences of their model. That is, the solutions trajectories of the traditional ZNN model converge to close to , while the solutions trajectories of the NSZNN model converge to close to . As a result, the NSZNN model performs better than the equivalent traditional ZNN model in solving the TV-MI problem.
To conclude, this paper introduced a novel neutrosophic adaptive ZNN model, NSZNN, to address the TV-MI problem. The focus of the study was to enhance the performance of the traditional ZNN design by creating and incorporating an NSLC. Two numerical experiments show that the NSZNN model is more effective than the equivalent traditional ZNN model. Future research could look into using nonlinear activation functions to speed up the ZNN dynamics' convergence rate even further.
Acknowledgments
Predrag Stanimirović is supported by the Science Fund of the Republic of Serbia, (No. 7750185, Quantitative Automata Models: Fundamental Problems and Applications - QUAM). This work was supported by the Ministry of Science and Higher Education of the Russian Federation (Grant No. 075-15-2022-1121).
References
Cichocki, A., & Unbehauen, R. (1993). A Cochocki and Rolf Unbehauen. Neural networks for optimization and signal processing. John Wiley & Sons, Inc.
Dai, J., Chen, Y., Xiao, L., Jia, L., & He, Y. (2022). Design and Analysis of a Hybrid GNN-ZNN Model With a Fuzzy Adaptive Factor for Matrix Inversion. IEEE Transactions on Industrial Informatics, 18(4), 2434-2442. DOI:
Jin, L., Zhang, Y., Li, S., & Zhang, Y. (2017). Noise-Tolerant ZNN Models for Solving Time-Varying Zero-Finding Problems: A Control-Theoretic Approach. IEEE Transactions on Automatic Control, 62(2), 992-997. DOI:
Katsikis, V. N., Stanimirovic, P. S., Mourtas, S. D., Xiao, L., Karabasevic, D., & Stanujkic, D. (2022). Zeroing Neural Network With Fuzzy Parameter for Computing Pseudoinverse of Arbitrary Matrix. IEEE Transactions on Fuzzy Systems, 30(9), 3426-3435. DOI:
Smarandache, F. (2003). A unifying field in logics: Neutrosophic Logic. Neutrosophy, Neutrosophic Set, Neutrosophic Probability. American Research Press, Rehoboth.
Stanimirović, P. S., Mourtas, S. D., Katsikis, V. N., Kazakovtsev, L. A., & Krutikov, V. N. (2022). Recurrent Neural Network Models Based on Optimization Methods. Mathematics, 10(22), 4292. DOI:
Zadeh, L. A. (1965). Fuzzy sets. Information and Control, 8(3), 338-353. DOI:
Zhang, Y., & Ge, S. S. (2005). Design and Analysis of a General Recurrent Neural Network Model for Time-Varying Matrix Inversion. IEEE Transactions on Neural Networks, 16(6), 1477-1490. DOI:
Zhong, N., Huang, Q., Yang, S., Ouyang, F., & Zhang, Z. (2021). A Varying-Parameter Recurrent Neural Network Combined With Penalty Function for Solving Constrained Multi-Criteria Optimization Scheme for Redundant Robot Manipulators. IEEE Access, 9, 50810-50818. DOI: 10.1109/access.2021.3068731
Copyright information

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License
About this article
Publication Date
27 February 2023
Article Doi
eBook ISBN
978-1-80296-960-3
Publisher
European Publisher
Volume
1
Print ISBN (optional)
-
Edition Number
1st Edition
Pages
1-403
Subjects
Hybrid methods, modeling and optimization, complex systems, mathematical models, data mining, computational intelligence
Cite this article as:
Mourtas, S. D., Stanimirović, P. S., & Katsikis, V. N. (2023). A Neutrosophic Adaptive Recurrent Neural Network for Time-Varying Matrix Inversion. In P. Stanimorovic, A. A. Stupina, E. Semenkin, & I. V. Kovalev (Eds.), Hybrid Methods of Modeling and Optimization in Complex Systems, vol 1. European Proceedings of Computers and Technology (pp. 249-255). European Publisher. https://doi.org/10.15405/epct.23021.30